











ที่ DCL ชุด actuators สนับสนุน Modbus-RTU โพรโทคอล. เรียกโปรแกรมป้อนเองคุณสามารถเชื่อมต่อที่ DCL actuator จะ Modbus.
แถบรายละเอียด
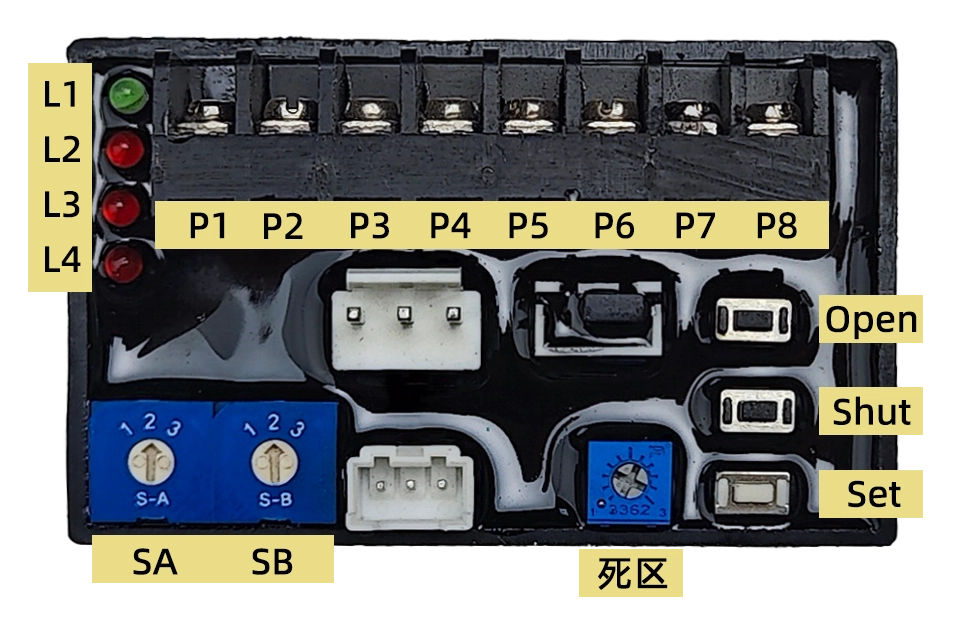
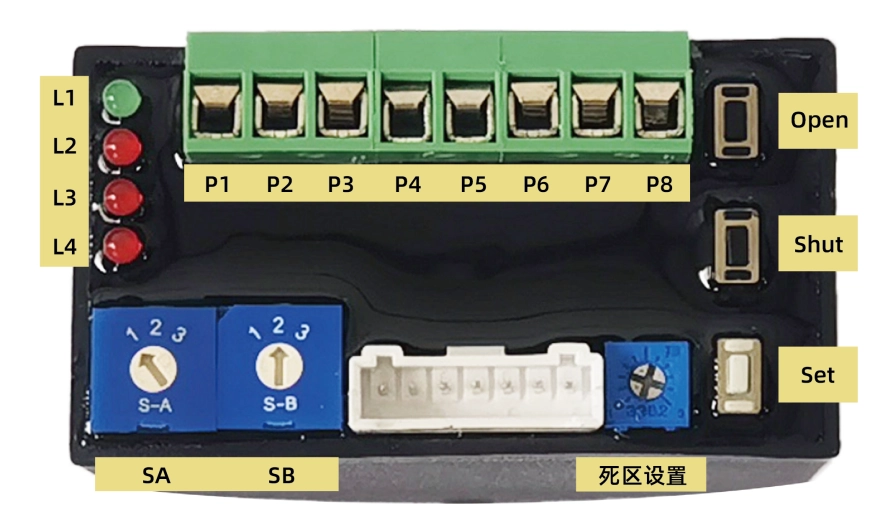
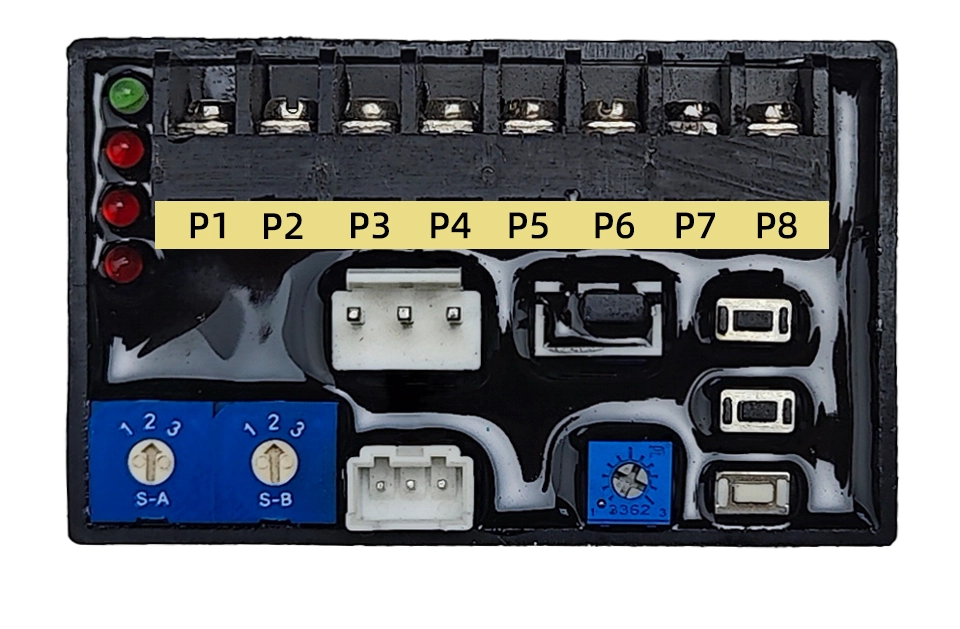
1、接口定义
P1:220VAC N线
P2:220VAC L线
P3:4-20mA输入-
P4:4-20mA输入+
P5:4-20mA พิมพ์ออก-
P6:4-20mA ผลส่งออก+
P7:RS485 น
P8:RS485 บี
2. ปุ่ม
เปิดใน"การตั้งค่าสถานะ"(นั่นคือลูกศรของปรับเทียบข้อมูลอัตโนมัติสลับซานอจุดไปที่"2")กรุณากดกุญแจที่จะเริ่ม actuator น,ปล่อกุญแจ,และใช้เครื่องยนต์หยุด ตั้งค่าและเปิดคือได้กดดันในเวลาเดียวกันซึ่งใช้สำหรับปรับตั้งแท่งควบคุมของเต็มที่เปิดตำแหน่งแล้ว
ปิด:กดกุญแจอยู่ใน"การตั้งค่าสถานะ"จะปิด actuator น,ปล่อกุญแจ,และใช้เครื่องยนต์หยุด เปิดและปิดปากเป็ดในเวลาเดียวกันสำหรับปรับตั้งแท่งควบคุมของเต็มที่ปิดตำแหน่งแล้ว
ตั้ง:ให้ความร่วมมือกับเปิดและปิดอยู่ใน"การตั้งค่าสถานะ"เพื่อประสบความสำเร็จในส่วเจาะจงฟังก์ชัน.
3. รับเทียบข้อมูลอัตโนมัติสลับ
ซา:เลือกระหว่างค่าที่เป็นบวกและลปฏิกิริยาโหมดและการตั้งค่าสถานะของนำเข้าข้อมูลสัญญาณ ตอนที่ระหว่างค่าที่เป็นบวกและลดปฎิกิริยาหรตั้งค่าการกำจัดพวกเขาต้องการพลังงานต่อรัฐที่เป็นท.ราฮาลขอบคุณครับ ที่สัมพันธ์กันฟังก์ชันที่ชี้ให้เห็นโดยลูกธนูสักดอกเป็นตาม(ตั้ง 1 ที่โรงงาน):
1-แน่นอนลูกเล่น 2-การตั้งค่าเมือง 3–ปฏิกิริยา
SB:ตั้งค่าปลอดภัยสถานที่ ตอนเว็บเบราว์เซอร์ภายนอกที่อนาล็อควบคุมสัญญาณเสียง actuator จะวิ่งไปที่ระบุตำแหน่งจากที่การตั้งค่านี้(ตั้ง 2 ที่โรงงาน). :
1–วิ่งหนีเข้าไปในเต็มที่เปิดตำแหน่ง 2–คนปัจจุบันตำแหน่ง 3–วิ่งหนีเข้าไปในเต็มที่ปิดตำแหน่ง
ข้อควรจำ:เมื่อใช้ modbus ควบคุมโหมด SB ควรจะเก็บที่ 2 ฟันเฟือง
4、死区值设置电位器
ใช้เพื่อตั้งค่าความตายเขตค่า. ที่เปิดของ potentiometer มาจาก 1-10 และที่สัมพันธ์กันตายพื้นที่คืนค่า 0.5%-5.0%(ความตายพื้นที่คืนค่าตั้ง 1.5%ที่โรงงาน).
5、指示灯
L1:เขียวพลังงานอะไรบ่งบอกว่าที่แสงสว่างอยู่เมื่อพลังงานป้อนวยการเชื่อมต่อกับห N และแอล terminals ของ servo controller.;
L2:สีแดงสัญญาณนำเข้าข้อมูลล้มเหลวความผิดอะไรบ่งบอกว่าที่แสงสว่างอยู่ตอนที่สัญญาณนำเข้าข้อมูลล้มเหลว;
L3:แดงตำแหน่งการตรวจสอบวงจรความผิดอะไรบ่งบอกว่าที่แสงสว่างอยู่ตอนที่นำของ potentiometer เปิดหุ้นระยะสั้หรือเสียหายโดยตัวมันเอง;
4:สีแดง:บ่งบอกว่าติดอยู่ความผิดแสงสว่างอยู่ตอนที่ติดอยู่ที่นี่หรอก
ตั้งค่าขึ้นมา
ทำให้ลูกศรของปรับเทียบข้อมูลอัตโนมัติจุดสับเปลี่กับตำแหน่ง"2"นั่นคือมันเข้ามาในการตั้งค่าของรัฐ. ในที่ตั้งของรัฐ,อาการของเลือดออกในสมปรับตั้งแท่งควบคุม,สัญญาณนำเข้าข้อมูลล้มเหลวการจัดการการเลือกวิธีการตายพื้นที่ค่าการตั้งค่าคู่มือปฏิบัติการและแสดงผลปัจจุบันการแก้ไขจะถูกแบกออกมา
1、行程标定
เต็มที่ปิดตำแหน่งปรับตั้งแท่งควบคุม:ปรับแก้คหัวใจที่ยังมีชีวิตยังหายไปที่เต็มที่ปิดตำแหน่งจากการกดเปิดและ/หรือปิดกระดุมแรกที่ปุ่มตั้งค่าปุ่มและจากนั้นกดที่ปุ่มปิด. เก็บกดปุ่มสองปุ่มสำหรับเรื่อง 4S นาทีในเวลาเดียวกัน เมื่อการแสดงตำแหน่งค่าแสงมืดจัดแสงสว่าง L2 อยู่,ปล่อยปิดและตั้งค่าปุ่มในเวลาเดียวกัน,L2 ไปออกและเต็มที่ปิดตำแหน่งเป็นตั้งระบบน่ะเสร็จแล้ว
เต็มที่เปิดตำแหน่งปรับตั้งแท่งควบคุม:ปรับแก้คหัวใจที่ยังมีชีวิตยังหายไปที่เต็มที่เปิดตำแหน่งจากการกดเปิดและ/หรือปิดกระดุมแรกที่ปุ่มตั้งค่าปุ่มและจากนั้นกดที่เปิดกระดุม เก็บกดปุ่มสองปุ่มสำหรับเรื่อง 4S นาทีในเวลาเดียวกัน เมื่อการแสดงตำแหน่งค่าแสงมืดจัดแสงสว่าง L2 อยู่,ปล่อยตัวเปิดและตั้งค่าปุ่มในเวลาเดียวกัน,L2 ไปออกและปรับตั้งแท่งควบคุมของเต็มที่เปิดตำแหน่งสมบูรณ์..
2、设置Modbus地址
通过modbus 通讯命令可修改通讯地址和波特率,执行器出厂地址为1,波特率为9600。(参考通讯指令实例)
3、死区值设置
ตายแล้วพื้นที่ค่าการตั้งค่าที่ potentiometer rotates มาจากด้านที่ตายแล้วเขตค่าเพิ่และ rotates ทวนเข็มนาฬิกา,ความตายเขตค่า decreases. นั่นคือปรับขนาดหน้าของ potentiometer และความตายเขตค่าขอเปลี่ยนแปลงโดย 0.5%สำหรับแต่ละปริญญาของการหมุน. เมื่อคนตายพื้นที่คืนค่าตั้งค่าจะเป็นเวลาน้อยกว่า 0.5%ง servo controller โพรเซสที่ 0.5%.
ในที่ตั้งของรัฐที่หัวใจที่ยังมีชีวิตยังหายสามารถเป็นด้วยตนเองเปิดและปิดจากการกดเปิดหรือปิด.
วิ่งหนี
เชื่อมต่อไปครับเทียบข้อมูลอัตโนมัติสซาไป"1"หรือ"3"ตำแหน่งนั่นก็คือมันเข้าห้องโดยอัตโนมัติปฏิบัติการของรัฐ.
- หลังจากพลังงาน-อยู่ที่ actuator adjusts ที่เปิดตามที่ 4-20mA นำเข้าข้อมูลสัญญาณโดยค่าปริยาย
- ส่งออกคำสั่งผ่าน Modbus สามารถทำให้ actuator ทำงานในการสื่อสารควบคุมโหมดและ actuator โดยอัตโนมัติจะกลับไปที่อนาล็อควบคุมหลังจากโหมดพลังงานล้มเหลวและเริ่มใหม่อีกครั้ง.
注意:采用通讯控制时,应确保SB为2档,每个控制命令应写控制模式和开度值,防止重启引起的不动作或运行到安全位置。
使用4-20mA控制执行机构开度
| นำเข้าข้อมูลสัญญาณ | 4mA | 8mA | 12mA | 16mA | 20mA |
| ตำแหน่งของตัวชี้ comment | CLOSE(0) | 2.5 | 5 | 7.5 | OPEN(0) |
| 阀门开度 | 0% | 25% | 50% | 75% | 100% |
| สัญญาณส่งออก | 4mA | 8mA | 12mA | 16mA | 20mA |
ข้อ:
- ตอนที่อยู่ที่ข้อมูลปัจจุบันของ 4mA corresponds ต้องการเปิดของหัวใจที่ยังมีชีวิตยังหายตำแหน่งของ 100%และแสดงผลปัจจุบันในตอนนี้คือ 20mA;ที่นำเข้าข้อมูลปัจจุบันของ 20mA corresponds ต้องการเปิดของหัวใจที่ยังมีชีวิตยังหายตำแหน่งขอ 0%และแสดงผลปัจจุบันในตอนนี้คือ 4mA.
- ที่ระดับความถูกต้องของ servo controller เป็นระดับ 1,คนพื้นฐานข้อผิดพลาดไม่ทันทั้งหมคือซินญอแบบ 1 และที่กลับมาวามแตกต่างคือเวลาน้อยกว่า 1%
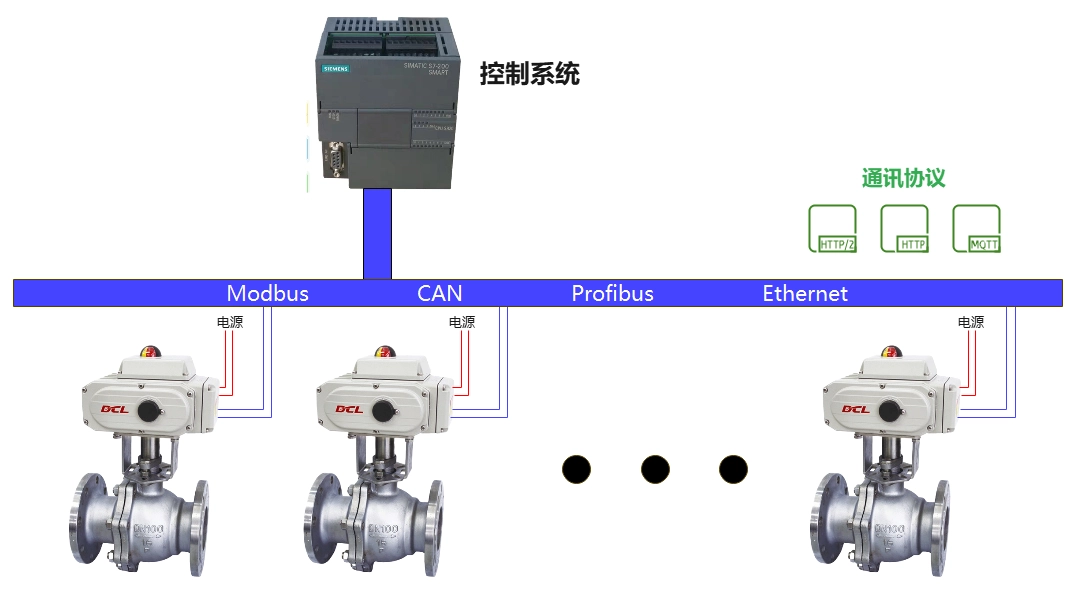
使用Modbus控制执行机构开度
物理层
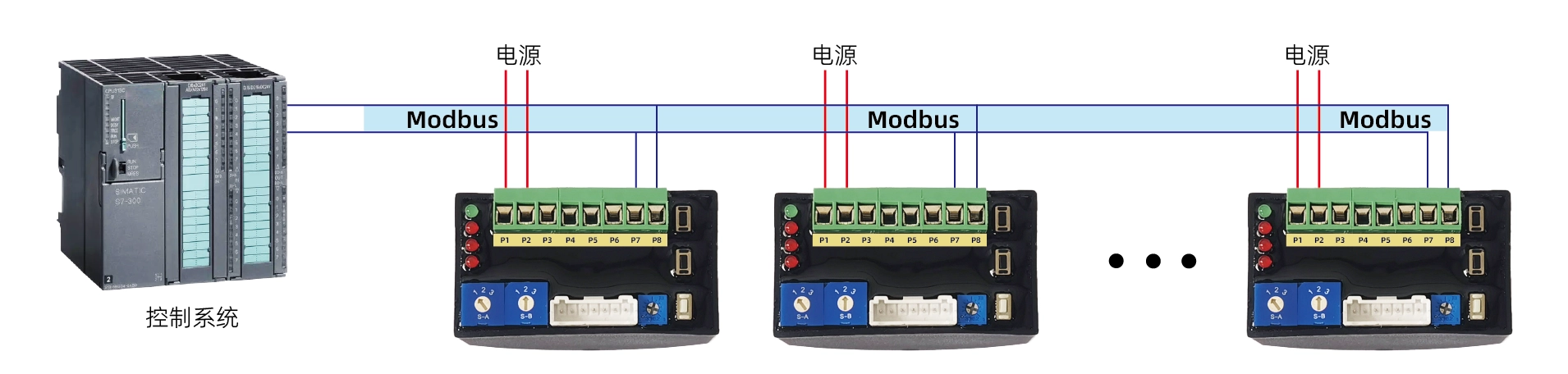
ที่ DCL actuator สนับสนุนที่ Modbus-RTU โพรโทคอลและใช้ RS485 ส่วนเชื่อมต่ออยู่ที่ทางกายภาพเลเยอร์.
จดหมายเวียนที่อยู่:1-127 สามารถปรับแต่งค่าปริยายคือ 1
การสื่อสาร baud อัตรา:configurable,ค่าปริยายคือ 115200
พอร์ตอนุกรมรูปแบบ:1 เริ่มกัด+ข้อมูล 8 บิต+1 หยุด
สนับสนุนการถ่ายทอดสด..ฟังก์ชัน
1、Modbus接口

P1:พลังงานป้อน-
P2:พลังงานป้อน+
P7:RS485 น
P8:RS485 บี
P3~P6:นาล็อกจอนสัญญาณ(4~20mA/0~10V)
2、Modbus接线示意图:
โปรแกรมเลเยอร์
1、ADU

2、功能码
| หมายเลข | ชื่อ | รายละเอียด |
|---|---|---|
| 0x03 | อ่านหลายลงทะเบียน | ในระยะไกลอุปกรณ์ใช้ฟังก์ชันรหัสอ่านเนื้อหาของแบบโทนต่อเนื่องบล็อกของถือลงทะเบียน |
| 0x06 | เขียนนัดเดียวทะเบียน | ในระยะไกลอุปกรณ์ใช้ฟังก์ชันรหัสที่จะเขียนนัดเดียวทะเบียน |
| 0x10 | เขียนหลายลงทะเบียน | ในระยะไกลอุปกรณ์ใช้ฟังก์ชันรหัสที่จะเขียแบบโทนต่อเนื่องลงทะเบียนบล็อค(1 ถึงเรื่อง 120 ลงทะเบียน) |
3、设置通讯参数
- เครื่องบันทึ 0x0040-0x0042 จะใช้ในการปรับแต่งการสื่อสารพารามิเตอร์
- ก่อนเขียน 0xA501 ต้องลงทะเบียน 0x0040 ป้การปรับแต่งค่าโหมดและจากนั้นก็เปลี่ยนแปลงทะเบียน 0x0041 และ 0x0042 เพื่อเปลี่ยนการสื่อสารที่อยู่และ baud อัตราการตามลำดับ
- หลังจากทำการแก้ไขมันสมบูรณ์แล้วที่พารามิเตอร์จะถูกปรับปรุงภายใน 1 วินาที,ฟวิ่งแอนด์โลนแต่พลาดและโดนรบกวนการสื่อสารต้องทำใน accordance ใหม่ของค่าพารามิเตอร์.
- หลังจากทำการแก้ไขมันสมบูรณ์แล้วคุณควรจะออกจากการปรับแต่งค่าโหมด(นั่นคือ,เขียน 0xA500 ต้องลงทะเบียน 0x0040)
4、强制进入默认通讯模式
- ตอนซาก็อยู่ใน 2 เกียร์และ SB อยู่ใน 2 ขอกรุณากดรอง KS ปุ่มสำหรับเรื่อง 3 วินาที หลังจากรอคอยสีแดงแสงแฟลชปลดปล่อย KS ปุ่มและจากนั้นก็กดรองรำคานเท้าด้สำหรับเรื่อง 3 วินาที หลังจากรอคอยสีแดงแสงต้องอยู่บน,ปล่อยคงรำคานเท้าด้ปุ่ม. ตอนนี้เวลาของการสื่อสารพารามิเตอร์ก็ถูกบังคับให้ค่าปริยายของรัฐและซาคือปรับตัว toYou สามารถออกจากปัจจุบันของรัฐหลังจาก 1 เกียร์และการสื่อสารพารามิเตอร์จะอยู่ที่ค่าปริยายของมัน ตอนที่อุปกรณ์เริ่มงานใหม่ที่ actuator นจะวิ่งใน accordance กับความเดิมตอนที่แล้วตั้งค่าพารามิเตอร์การสื่อสาร.
- ตอนที่คุณลืมเรื่องก่อนหน้าการสื่อสารพารามิเตอร์,คุณสามารถใช้วิธีการจะป้อนค่าปริยายการสื่อสารของรัฐและปรับแต่งรูปแบบการได้รับการสื่อสารพารามิเตอร์
5、寄存器列表
| ลงทะเบียนที่อยู่ | เครื่องคิดเงินชิ้ | สัญญาณนกลุ่ม | ชื่อของสัญญาณ | ค่าต่ำสุด | ค่าสูงสุด | หน่วย | อ่าน/เขียน | ประเภท | ความจริงโต๊ะ | รายละเอียด |
|---|---|---|---|---|---|---|---|---|---|---|
| 0x0010 | b15-b5 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r/w | ชั่ | เก็บ 0 | ไว้ |
| b5 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r/w | ชั่ | เก็บ 0 | ไว้ | |
| ขนาด b4 | ควบคุม | หยุด | \ | \ | \ | สเปนเซอร์รี้ดครับ r/w | ชั่ | 1:หยุด,0:ปกติ | หยุดวิ่ง | |
| รูปแบบ b3 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ | |
| b2 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ | |
| b1-b0 | ควบคุม | โหมด | \ | \ | \ | สเปนเซอร์รี้ดครับ r/w | ชั่ | 1:การสื่อสารควบคุม อื่นๆ:ทางออกสื่อสารควบคุม | โหมดควบคุม | |
| 0x0011 | b15-b0 | ควบคุม | SetOpenDegree | 0 | 10000 | % | สเปนเซอร์รี้ดครับ r/w | int ได้/ชั่ | 0-10000 corresponds จะ 0-100%เปิด | ควบคุมที่เปิดของหัวใจที่ยังมีชีวิตยังหาย(สัมพันธ์กับสัดส่ว coefficient 1/100) |
| 0x0012 | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x0013 | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x0014 | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x0015 | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x0016 | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x0017 | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x0018 | b15-ขนาด b6 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| b5 | infor | errPosition | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | 1:ตำแหน่งสัญญาณความล้มเหลว | ตำแหน่งสัญญาณความผิดของเซ็น | |
| ขนาด b4 | infor | errSignal | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | 1:สัญญาณนำเข้าข้อมูลล้มเหลว | นำเข้าข้อมูลสัญญาณความผิดของธง | |
| รูปแบบ b3 | infor | overTorqueFlag | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | 1:โอเวอร์โหลด | โอเวอร์โหลดเซ็น | |
| b2 | infor | stuckFlag | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | 1:ถ่วงเวลา | ถ่วงเวลาเซ็นต์ | |
| b1 | infor | openRunFlag | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | 1:การปิดหัวใจที่ยังมีชีวิตยังหาย | หัวใจที่ยังมีชีวิตยังหายเปิดเซ็น | |
| b0 | infor | closeRunFlag | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | 1:การเปิดหัวใจที่ยังมีชีวิตยังหาย | ปิดหัวใจที่ยังมีชีวิตยังหายเซ็น | |
| 0x0019 | b15-b0 | infor | openDegree | 0 | 10000 | % | สเปนเซอร์รี้ดครับ r | int ได้/ชั่ | 0-10000 corresponds จะ 0-100%เปิด | งานเปิดตัวปัจจุบันหัวใจที่ยังมีชีวิตยังหาย(สัมพันธ์กับสัดส่ว coefficient 1/100) |
| 0x001A | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x001B | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x001C | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x001D | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x001E | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x001F | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x0040 | b15-b0 | config | cfgMode | 1 | 127 | \ | rw | ชั่ | 0x0000:เข้าโหมดปกติ 0xA501:ป้อนการปรับแต่งค่าโหมด | โหมดการเลือกเฉพาะในการปรับแต่งค่าโหมดสามารถในการปรับแต่งค่าพารามิเตอร์ถูกแก้ไข |
| 0x0041 | b15-b0 | config | cmm_addr | 1 | 127 | \ | rw | ชั่ | 1~127 | ตั้งค่าที่อยู่จดหมายเวียน |
| 0x0042 | b15-b0 | config | cmm_baudrate | \ | \ | \ | rw | ชั่ | 0:Baud อัตราการ 4800 1:Baud อัตราการ 9600 2:Baud อัตราการ 19200 3:Baud อัตราการ 115200 | ตั้งค่า baud อัตราการ เขียน baud อัตราการตามความจริงโต๊ะตอนที่เขียน กลับไปโดยความจริงโต๊ะตอนที่อ่าน |
| 0x0043 | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x0044 | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x0045 | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x0046 | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x0047 | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
| 0x0048 | b15-b0 | \ | \ | \ | \ | \ | สเปนเซอร์รี้ดครับ r | ชั่ | เก็บ 0 | ไว้ |
ตัวอย่างของการสื่อสารคำแนะนำ
1、控制阀门位置
- ป้อนสื่อสารควบคุมโหมด:
ผม→◇01 10 00 10 00 01 02 00 01 65 00
ใบเสร็จ←◆011000100001000C - ตั้งค่าหัวใจที่ยังมีชีวิตยังหายตำแหน่ง:0%
ผม→◇01 10 00 11 00 01 02 00 00 A511
ใบเสร็จ←◆01100011000151 CC - ตั้งค่าหัวใจที่ยังมีชีวิตยังหายตำแหน่ง:50%(5000->0x1388)
ผม→◇01 10 00 11 00 01 02 13 88 A847
ใบเสร็จ←◆01100011000151 CC - ตั้งค่าหัวใจที่ยังมีชีวิตยังหายตำแหน่ง:100%(10000->0x2710)
ผม→◇01 10 00 11 00 01 02 27 10 เป็นแฟนกัน 2D
ใบเสร็จ←◆01100011000151 CC - หยุดวิ่ง
ผม→◇01 10 00 10 00 01 02 00 11 64 ซีซี
ใบเสร็จ←◆011000100001000C
2、读取阀门状态
- ผม→◇010300180002 เลขที่ 440C
- ใบเสร็จ←◆01030400300000 ร้อ 3C
3、设置通讯地址
- ป้อนการปรับแต่งค่าโหมด
ผม→◇01100040010002 A5011200
ใบเสร็จ←◆011000400100001D - เปลี่ยนการจดหมายเวียนที่อยู่ไปยัง:2
ผม→◇01 10 00 41 00 01 02 00 02 28 80
ใบเสร็จ←◆01100041010051 DD - ออกจากการปรับแต่งค่าโหมด
ผม→◇02100040010002 A500 C730
ใบเสร็จ←◆021000400100002E
4、设置通讯波特率
- ป้อนการปรับแต่งค่าโหมด
ผม→◇01100040010002 A5011200
ใบเสร็จ←◆011000400100001D - แก้ไขรายการสื่อสาร baud อัตราการเพื่อ:9600
ผม→◇01 10 00 42 00 01 02 00 01 68 B2
ใบเสร็จ←◆011000420100 A1 DD - ออกจากการปรับแต่งค่าโหมด
ผม→◇01100040010002 A500 D3 C0
ใบเสร็จ←◆011000400100001D












 China. Kgm การเครือข่ายรปภ.ไม่ 42018502006527
China. Kgm การเครือข่ายรปภ.ไม่ 42018502006527