











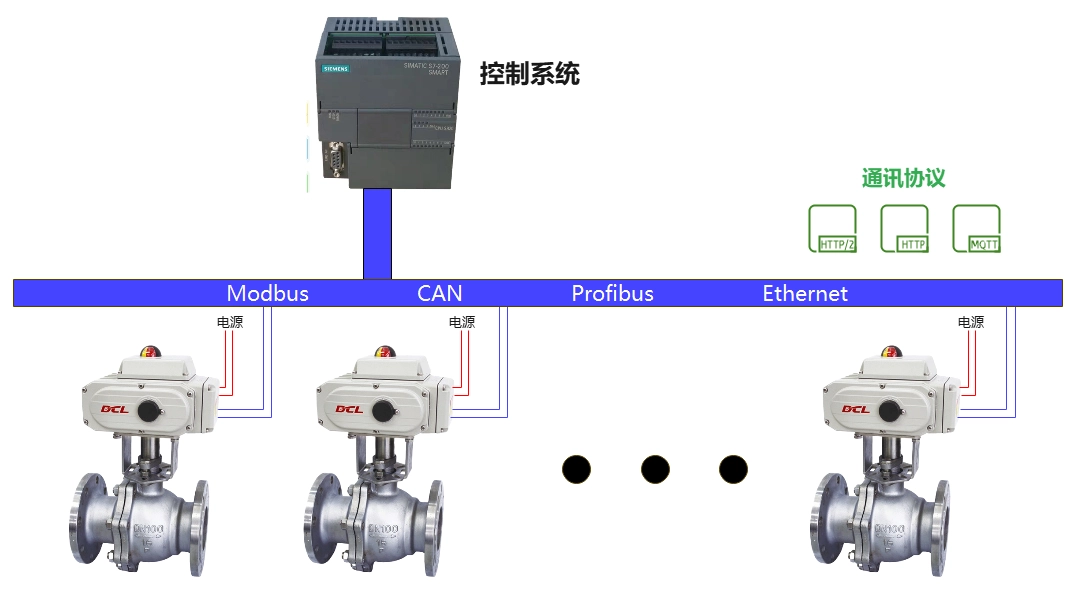
El DCL de la serie de actuadores de soporte de Modbus-RTU protocolo. Consulte el manual de aplicación, puede conectar el DCL del actuador a Modbus.
Descripción del Panel
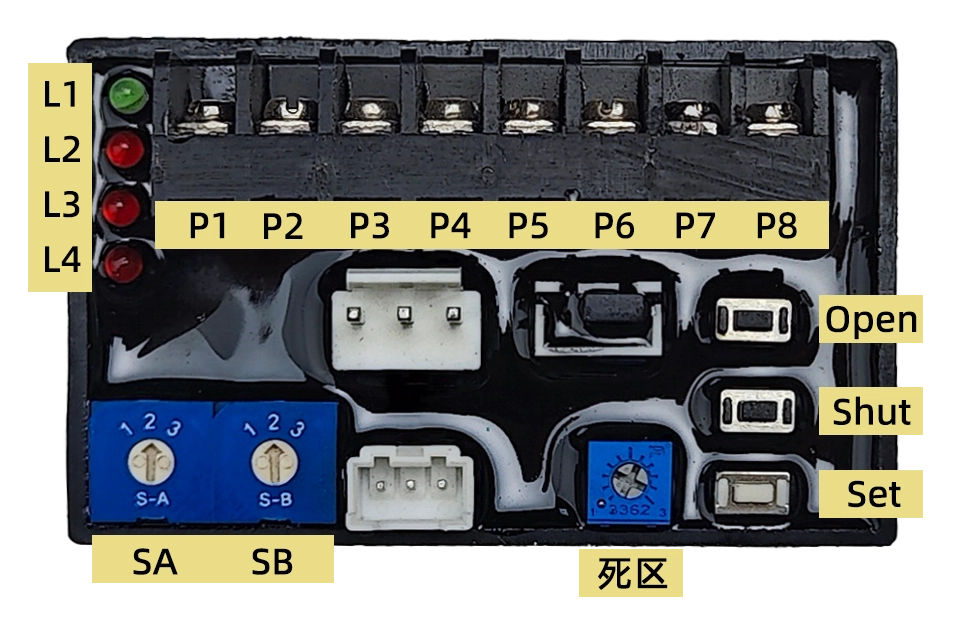
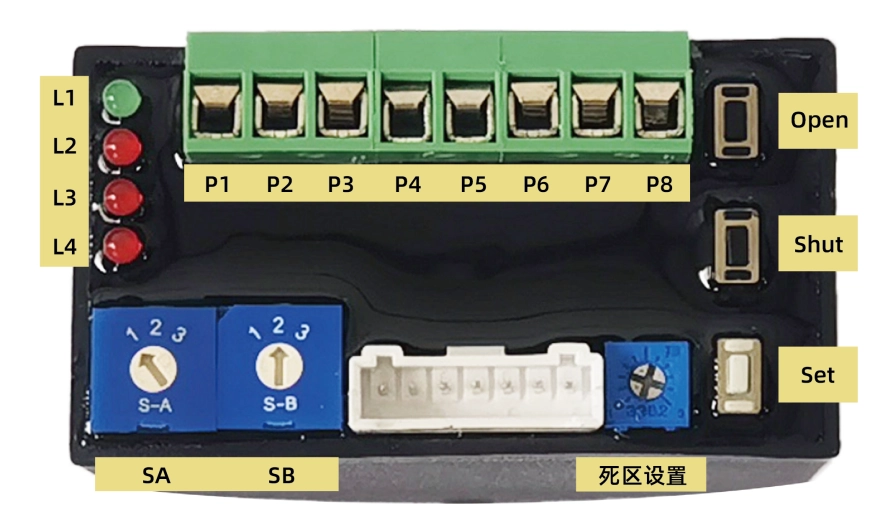
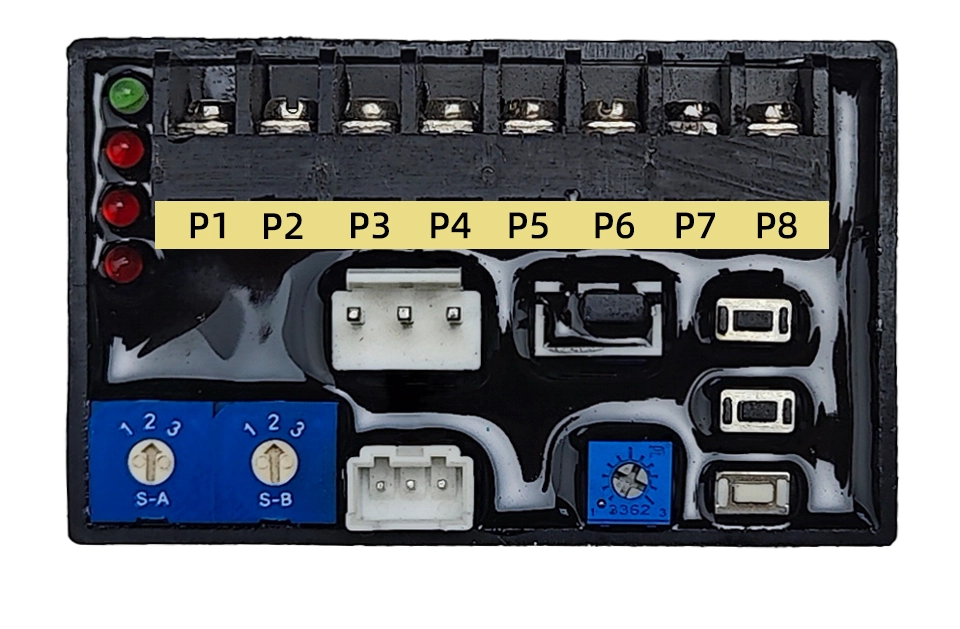
1、接口定义
P1:220VAC N线
P2:220VAC L线
P3:4-20mA输入-
P4:4-20mA输入+
P5:4-20mA输出-
P6:4-20mA输出+
P7:RS485 A
P8:RS485 B
2、按键
Abierto: En la "configuración de estado" (es decir, la flecha del selector de SA puntos "2"), pulse esta tecla para iniciar el actuador, el lanzamiento de esta clave, y el motor se detiene. Conjunto Abierto y se presionan al mismo tiempo, que se utiliza para la calibración de la posición totalmente abierta.
Se cierran: Pulse esta tecla en el "ajuste de estado" para apagar el actuador, el lanzamiento de esta clave, y el motor se detiene. Establecer y Cerrar son presionados al mismo tiempo para la calibración de la posición completamente cerrada.
Conjunto: Cooperar con Abrir y Cerrar en el "ajuste de estado" para lograr funciones específicas.
3、选择开关
SA: Seleccione el positivo y el negativo modo de reacción y establecer el estado de la señal de entrada. Cuando el positivo y negativo de la reacción se establece la configuración, se deben establecer en el estado encendido para ser eficaz. Las funciones correspondientes señalado por las flechas son como sigue (1 en la fábrica):
1-efecto Positivo 2-establecer el estado de las 3 de la reacción
SB: Establecer la ubicación segura. Cuando el externo analógico de la señal de control se pierde, el actuador se ejecute a una ubicación específica de acuerdo a esta configuración (set a 2 en la fábrica). :
1–Correr a la posición completamente abierta 2–Mantener la posición actual 3–correr a la posición totalmente cerrada
Nota: Cuando se utiliza modbus modo de control, SB debe ser mantenido en el 2 engranajes
4、死区值设置电位器
Se utiliza para establecer la zona muerta de valor. La apertura del potenciómetro es de 1-10, y la correspondiente zona muerta valor es de 0,5%-5.0% (la zona muerta valor se establece en 1,5% en la fábrica).
5、指示灯
L1Color : verde, indicación de alimentación, la luz se enciende cuando la fuente de alimentación está conectada a la N y L terminales del controlador de servos.;
L2: Rojo, la señal de entrada falla, la indicación de la falla, la luz se enciende cuando la señal de entrada falla;
L3: El rojo, el de detección de posición del circuito de indicación de la falla, la luz se enciende cuando el cable del potenciómetro está abierto, cortado o dañado de por sí;
L4: Rojo: Indicación de parada de la culpa, la luz está encendida cuando se atascan.
Configurar
Hacer que la flecha del selector hacia la posición "2", es decir, ha entrado en la configuración del estado. En el conjunto del estado, el accidente cerebrovascular calibración de la señal de entrada de control de errores de método de selección, la zona muerta valor de ajuste, manual de operación y salida de la corrección actual puede llevarse a cabo.
1、行程标定
La posición totalmente cerrada de calibración: Ajuste de la válvula a la posición totalmente cerrada pulsando la apertura y/o Cierre de botones, presione primero el botón Configurar y, a continuación, presione el Cierre botón. Mantenga pulsado los dos botones durante unos 4S minutos al mismo tiempo. Cuando la luz del indicador de L2 está encendido, suelte el Cierre y botones de ajuste al mismo tiempo, L2 se apaga, y la posición totalmente cerrada está calibrado.hecho.
Posición completamente abierta de calibración: Ajuste de la válvula a la posición completamente abierta presionando la apertura y/o Cierre de botones, presione primero el botón Configurar y, a continuación, pulse el botón Abrir. Mantenga pulsado los dos botones durante unos 4S minutos al mismo tiempo. Cuando la luz del indicador de L2 está encendido, suelte el Abrir y Configurar los botones al mismo tiempo, L2 se apaga, y la calibración de la posición de apertura completa es completa..
2、设置Modbus地址
通过modbus 通讯命令可修改通讯地址和波特率,执行器出厂地址为1,波特率为9600。(参考通讯指令实例)
3、死区值设置
Zona muerta valor de ajuste Del potenciómetro gira hacia la derecha, la zona muerta valor aumenta, y gira en sentido antihorario, la zona muerta valor disminuye. Hay una escala en la parte frontal del potenciómetro, y la zona muerta de los cambios en el valor del 0,5% por cada grado de rotación. Cuando la zona muerta valor se establece a ser menor de 0,5%, el servo controlador de procesos en el 0,5%.
En el conjunto del estado, la válvula puede abrirse manualmente y cerrada con la tecla, Abiertos o Cerrados.
ejecutar
Marque el interruptor selector S.A. para el "1" o "3" de la posición, es decir, entra en la operación automática del estado.
- Después del encendido, el actuador se ajusta la apertura de acuerdo a la 4-20mA señal de entrada por defecto.
- El envío de comandos a través de Modbus puede hacer que el actuador trabajar en la comunicación de modo de control, y el actuador vuelve automáticamente a la analógica modo de control después de fallo de alimentación y reinicie.
Nota: Cuando se utiliza el control de comunicación, asegúrese de que el SB es de 2 engranajes, y cada uno de los comandos de control debe escribir en el modo de control y la apertura de valor para evitar que la inactividad causada por reiniciar o correr a un lugar seguro.
El uso de 4-20mA para el control de la apertura del actuador
| Señal de entrada | 4mA | 8mA | 12mA | 16 ma | 20mA |
| La posición del puntero del | CERCA de(0) | 2.5 | 5 | 7.5 | ABIERTO(0) |
| La apertura de la válvula | 0% | 25% | 50% | 75% | 100% |
| La señal de salida | 4mA | 8mA | 12mA | 16 ma | 20mA |
nota:
- Al reaccionar, la entrada de corriente de 4 ma corresponde a la apertura de la posición de la válvula de 100%, y la corriente de salida en este momento es de 20mA; la entrada de corriente de 20 ma corresponde a la apertura de la válvula a la posición de 0%, y la corriente de salida en este momento es de 4mA.
- El nivel de precisión del controlador de servos es de nivel 1, el error básico no exceda de ±1%, y la devolución de la diferencia es de menos de 1%
El uso de Modbus para el control de la apertura del actuador
物理层
El DCL del actuador soporta Modbus-RTU protocolo y usos de la interfaz RS485 en la capa física.
Dirección postal: 1-127 puede ser configurado, el valor predeterminado es 1
Tasa de baudios de comunicación: configurable, por defecto es 115200
Puerto serie formato: 1 bit de start + 8 bits de datos + 1 bit de parada
Soporte de difusión de la función
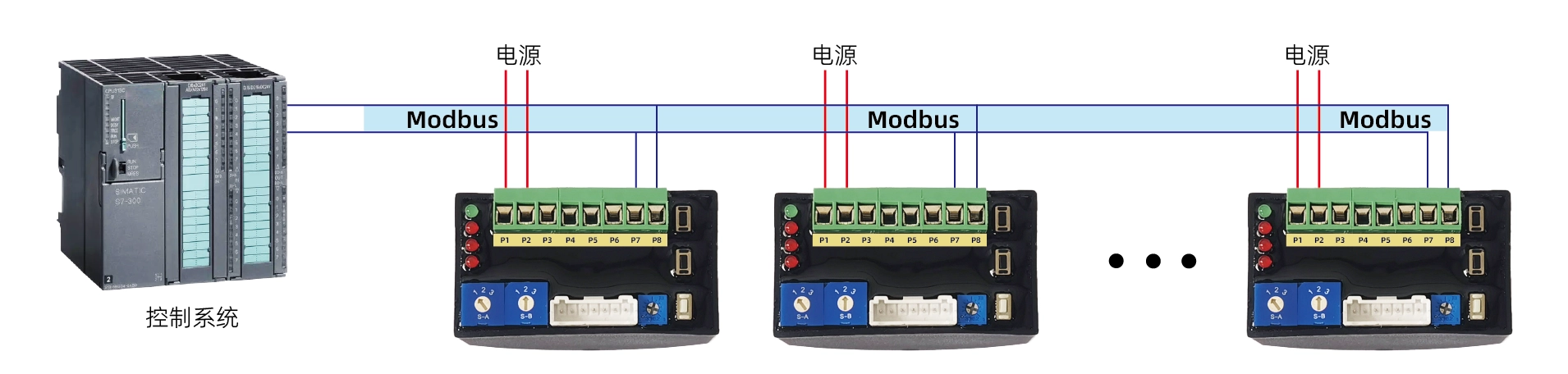
1. Interfaz Modbus

P1: fuente de Alimentación-
P2: fuente de Alimentación+
P7:RS485 A
P8:RS485 B
P3~P6: Analógico reservados de la señal (4~20mA/0~10V)
2、Modbus接线示意图:
Capa de aplicación
1. ADU

2、功能码
| ID | nombre | descripción |
|---|---|---|
| 0x03 | Lectura múltiple de registros | En un dispositivo remoto, utilice este código de función para leer el contenido de un bloque continuo de registros de retención |
| 0x06 | Escribir un registro único | En un dispositivo remoto, utilice este código de función para escribir un registro único |
| 0x10 | Escribir múltiples registros | En un dispositivo remoto, utilice este código de función para escribir padrón continuo de los bloques (1 a alrededor de 120 registros) |
3、设置通讯参数
- Registro 0x0040-0x0042 se utiliza para configurar los parámetros de comunicación
- Primera escritura 0xA501 para registrar 0x0040, entrar en el modo de configuración y, a continuación, modificar los registros 0x0041 y 0x0042 para cambiar la dirección de comunicación y la velocidad en baudios, respectivamente.
- Después de la modificación se completa, los parámetros se actualizará dentro de 1 segundo, y la posterior comunicación debe hacerse de acuerdo con los nuevos parámetros.
- Después de la modificación se completa, usted debe salir del modo de configuración (es decir, escribir 0xA500 para registrar 0x0040)
4、强制进入默认通讯模式
- Cuando SA se encuentra en la 2ª marcha y SB es en el 2º equipo, presione y mantenga presionado el KS botón por alrededor de 3 segundos. Después de la espera de la luz roja a parpadear, suelte el KS botón y, a continuación, pulse y mantenga pulsado KC durante unos 3 segundos. Después de esperar el semáforo en rojo para quedarse, suelte el KC botón. En este momento, los parámetros de comunicación están obligados al estado por defecto, y SA es ajustado frente a ti puede salir del estado actual después de 1 engranaje, y los parámetros de comunicación seguirán siendo los valores por defecto. Cuando se reinicie el dispositivo, el actuador se ejecutará de conformidad con el establecido previamente los parámetros de comunicación.
- Cuando usted se olvida de los anteriores parámetros de comunicación, puede utilizar este método para entrar en el valor predeterminado de comunicación del estado y configurar los parámetros de comunicación.
5、寄存器列表
| Dirección de registro | Bits de registro | La señal de grupo | Nombre de la señal | Valor mínimo | Valor máximo | unidad | Leer/escribir | tipo de | Tabla de verdad | descripción |
|---|---|---|---|---|---|---|---|---|---|---|
| 0x0010 | b15-b5 | \ | \ | \ | \ | \ | r/w | hex | Mantener 0 | reservados |
| b5 | \ | \ | \ | \ | \ | r/w | hex | Mantener 0 | reservados | |
| b4 | control | stop | \ | \ | \ | r/w | hex | 1: Detener, 0: Normal | 停止运行 | |
| b3 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados | |
| b2 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados | |
| b1-b0 | control | mode | \ | \ | \ | r/w | hex | 1: control de la Comunicación Otros: Salida de control de la comunicación | Modo de Control de | |
| 0x0011 | b15-b0 | control | SetOpenDegree | 0 | 10000 | % | r/w | int/hex | 0-10000 corresponde a 0-100% apertura | Control de la apertura de la válvula (coeficiente coeficiente 1/100) |
| 0x0012 | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x0013 | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x0014 | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x0015 | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x0016 | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x0017 | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x0018 | b15-b6 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| b5 | infor | errPosition | \ | \ | \ | r | hex | 1: Posición de la señal de fracaso | La posición de la señal de fallo de señal | |
| b4 | infor | errSignal | \ | \ | \ | r | hex | 1: Entrada de la señal de fracaso | Entrada de señal de fallo de la bandera | |
| b3 | infor | overTorqueFlag | \ | \ | \ | r | hex | 1: Sobrecarga | La sobrecarga de señal | |
| b2 | infor | stuckFlag | \ | \ | \ | r | hex | 1: Puesto de | Puesto signo | |
| b1 | infor | openRunFlag | \ | \ | \ | r | hex | 1: Cierre la válvula de | Apertura de la válvula de signo | |
| b0 | infor | closeRunFlag | \ | \ | \ | r | hex | 1: la Apertura de la válvula | Cierre la válvula de signo | |
| 0x0019 | b15-b0 | infor | openDegree | 0 | 10000 | % | r | int/hex | 0-10000 corresponde a 0-100% apertura | La apertura de la corriente de la válvula (coeficiente coeficiente 1/100) |
| 0x001A | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x001B | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x001C | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x001D | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x001E | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x001F | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x0040 | b15-b0 | config | cfgMode | 1 | 127 | \ | rw | hex | 0x0000: Entrar en modo normal 0xA501: Entrar en el modo de configuración | Selección de modo, sólo en el modo de configuración puede que la configuración de los parámetros de ser modificado |
| 0x0041 | b15-b0 | config | cmm_addr | 1 | 127 | \ | rw | hex | 1~127 | Establecer la dirección de correo |
| 0x0042 | b15-b0 | config | cmm_baudrate | \ | \ | \ | rw | hex | 0: velocidad en Baudios 4800 1: tasa de Baudios 9600 2: tasa de Baudios de 19200 3: tasa de Baudios 115200 | Establece la velocidad en baudios Escribir la velocidad en baudios de acuerdo a la tabla de verdad al escribir Regreso por la tabla de verdad cuando la lectura |
| 0x0043 | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x0044 | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x0045 | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x0046 | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x0047 | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
| 0x0048 | b15-b0 | \ | \ | \ | \ | \ | r | hex | Mantener 0 | reservados |
Ejemplos de comunicación de instrucciones
1、控制阀门位置
- Introduzca la comunicación de control de modo:
cabello→◇01 10 00 10 00 01 02 00 01 65 00
Recibo←◆01 10 00 10 00 01 00 0C - Establecer la posición de la válvula: 0%
cabello→◇01 10 00 11 00 01 02 00 00 A5 11
Recibo←◆01 10 00 11 00 01 51 CC - Establecer la posición de la válvula: 50% (5000->0x1388)
cabello→◇01 10 00 11 00 01 02 13 88 A8 47
Recibo←◆01 10 00 11 00 01 51 CC - Establecer la posición de la válvula: 100% (10000->0 x 2710)
cabello→◇01 10 00 11 00 01 02 27 10 BF 2D
Recibo←◆01 10 00 11 00 01 51 CC - 停止运行
cabello→◇01 10 00 10 00 01 02 00 11 64 CC
Recibo←◆01 10 00 10 00 01 00 0C
2、读取阀门状态
- Cabello→◇01 03 00 18 00 02 44 0C
- Recibo←◆01 03 04 00 30 00 00 FA 3C
3、设置通讯地址
- Introduzca el modo de configuración
Cabello→◇ 01 10 00 40 00 01 02 A5 01 12 00
Recibo←◆01 10 00 40 00 01 001D - Modificar la dirección de correo a: 2
cabello→◇01 10 00 41 00 01 02 00 02 28 80
Recibo←◆01 10 00 41 00 01 51 DD - Salir del modo de configuración
Cabello→◇02 10 00 40 00 01 02 A5 00 C7 30
Recibo←◆02 10 00 40 00 01 00 2E
4、设置通讯波特率
- Introduzca el modo de configuración
Cabello→◇ 01 10 00 40 00 01 02 A5 01 12 00
Recibo←◆01 10 00 40 00 01 001D - Modificar la comunicación en baudios: 9600
cabello→◇01 10 00 42 00 01 02 00 01 68 B2
Recibo←◆01 10 00 42 00 01 A1 DD - Salir del modo de configuración
Cabello→◇ 01 10 00 40 00 01 02 A5 00 D3 C0
Recibo←◆01 10 00 40 00 01 001D












 Hubei Red Pública De Seguridad Nº 42018502006527
Hubei Red Pública De Seguridad Nº 42018502006527