









Norma nacional para actuadores eléctricos: JB/T 8219-2016 ordinario y eléctrica inteligente de los actuadores de proceso industrial, sistemas de control (estándar nacional para los actuadores eléctricos)
Contenido
Prólogo
1 Rango 1
2 Normativo del documento de referencia 1
3 Términos y definiciones 1
4 clasificación de Producto y parámetros básicos 2
4.1 clasificación del Producto 2
4.2 parámetros Básicos 2
5el funciones básicas de los sistemas inteligentes de actuador 3
5.1 la función de Visualización de 3
5.2 ajuste de Parámetros de la función 3
5.3 En el sitio de la función de la configuración 3
5.4 Culpa de auto-diagnóstico y función de alarma 4
5.5 función de Comunicación 4
5.6 Otras funciones 4
6 Requisitos 4
6.1 Básica de los requisitos de desempeño 4
6.2 requisitos de Rendimiento se ve afectado por la cantidad de influencia 6
6.3 Apariencia 8
6.4 Shell nivel de protección 8
6.5 prueba de Explosión rendimiento 8
7 método de Prueba 8
7.1 condiciones de Prueba 8
7.2 disposiciones Generales para las pruebas de 9
7.3 error Básico 9
7.4 básicos de la desviación de la posición de la señal de salida 9
7.5 de Retorno de 10
7.6 zona Muerta 10
7.7 Tiempo de retardo de 10
7.8 Nominal tiempo de viaje 10 de error
7.9 Partir de características 11
7.10 Repetibilidad error de ictus de mecanismo de control 11
7.11 resistencia de Aislamiento 11
7.12 fuerza del Aislamiento 11
7.13 el aumento de Temperatura 11
7.14 operación a Largo plazo de la estabilidad de 11
7.15 Máximo y mínimo de control de torque y empuje repetibilidad error 11
7.16 Manual-eléctrico mecanismo de cambio de 12
7.17 funciones Básicas de Smart Tipo 12
7.18 el Ruido de 13
7.19 Continuo (conversión de frecuencia) regulación de la velocidad de 13
7.20 Impacto de la temperatura ambiente 13
7.21 Efectos del calor y la humedad 14
7.22 Impacto de la tensión de alimentación de 14
7.23 Impacto de las vibraciones mecánicas 14
7.24 el impacto Ambiental del transporte 15
7.25 Inmunidad a campo electromagnético de la radiofrecuencia de la radiación 15
7.26 transitorios Eléctricos rápidos inmunidad a ráfagas de 15
7.27 Sobretensiones (shock) la inmunidad de 5
7.28 descarga Electrostática inmunidad 15
7.29 frecuencia de la Energía de inmunidad al campo magnético de 15
7.30 Aspecto 16
7.31 Shell nivel de protección 16
7.32 a prueba de Explosión rendimiento 16
8 reglas de Inspección 16
8.1 inspección de la Fábrica 16
8.2 Tipo de inspección 16
9 Marcado, embalaje y almacenamiento 17
9.1 Marca 17
9.2 Paquete de 18
9.3 Almacenamiento 18
Tabla 1 indicadores Técnicos de rendimiento básico 4
Tabla 2 indicadores Técnicos que afectan a la cantidad de 6
Tabla 3 Inspección De Los Artículos 16
Prólogo
Esta norma está redactada de conformidad con las reglas dadas en GB/T1.1-2009.
Esta norma sustituye a JB/T8219-1999 "Actuador Eléctrico para los Procesos Industriales de Medición y Control del Sistema". En comparación con JB/T 8219-1999, los principales cambios técnicos son como sigue:
--Estándar cambiado de nombre;
--Actualizada la normativa de referencia del documento (véase el Capítulo 2);
- En la clasificación del producto, el estándar original se clasifican de acuerdo a la relación entre la entrada y la salida del actuador en el estándar original, y es modificado para ser clasificados según el modo de control del actuador, dividido en cambiar de tipo de actuador y ajustable actuador (ver 4.1.2); el método de clasificación por unidad de motor en el modo (ver 4) ha sido añadido..1.4); además de los indicadores de "características de amortiguación, el despacho, y la ociosidad" (véase la sección 4.2 de la edición de 1999);
--Modificar el estándar original de 3.7 "con actuador proporcional de la señal de entrada" a la preferida de la señal de entrada de la ajustable actuador y el preferido de la señal de entrada del actuador de conmutación (ver 4.2.5);
--Añade el contenido de las funciones básicas de los sistemas inteligentes de actuador (véase el Capítulo 5);
--El nivel de precisión fue revisado a partir de la original estándar "en el Nivel 1, el Nivel de 2.5, nivel 5" a "Nivel de 0.5, el Nivel 1.0, nivel de 1.5, el nivel de 2.5" (ver Tabla 1); el "proporcional actuador eléctrico" y "integral actuador eléctrico", en el original tabla 1 se revisaron para "Proporcional actuador eléctrico".Ajustable"actor"del accionador del Interruptor";
--Los requisitos que se han añadido "máximo y mínimo de control de torque y empuje repetibilidad error", "Inteligente funciones básicas", "campo electromagnético de la radiofrecuencia de la radiación de la inmunidad", "transitorios Eléctricos rápidos inmunidad a ráfagas", "Oleada (shock) inmunidad", "descarga Electrostática inmunidad".Interferencia", "la frecuencia de la energía del campo magnético de la inmunidad" y otros requisitos (ver 6.1.13、6.1.15、6.2.6、6.2.7、6.2.8、6.2.9、6.2.10);
--Algunos métodos de prueba que se hayan modificado o añadido, tales como el aumento de la temperatura (ver 7.13), la influencia de la temperatura ambiente (consulte 7.20), y la influencia de la tensión de alimentación (ver 7.22).
Este estándar propuesto por la China de la Industria de Maquinaria de la Federación.
Este estándar es centralizada por el Comité Técnico Nacional de Normalización de Procesos Industriales de Medición, Automatización y Control (SAC/TC124).
La redacción de la unidad de la presente norma: Shanghai Automatización Industrial Instrumento, el Instituto de Investigación de Suzhou Borui aparatos de Medición y Control Co., Ltd., Wenzhou Ruiji aparatos de Medición y Control Co., Ltd., Beijing Aotemei Control Automático De Los Equipos Co., Ltd., Changzhou Estación De Energía Auxiliar De La Máquina De La Fábrica, Hangzhou Ruiyu Electrónica Actuador De Fabricación Co., Ltd., Tianjin Jinbo Instrumento Tecnología Co., Ltd.、Wuhan DCL Controls La Tecnología Co., Ltd.Yangzhou Aibode Control Automático De Fabricación De Equipos Co., Ltd.
Los redactores principales de esta norma: Zheng Yong, Zhang Jianwei, Li Minghua, Li Weihua, Guo Aihua, Chen Jianguo, Chen Jun, Ge Runping, Li Limin、
Peng Qilin y Xu Zhen.
Las versiones anteriores de la norma sustituida por esta norma, han sido liberados como sigue:
--JB/T 8219-1995, JB/T 8219-1999.
Ordinaria y eléctrica inteligente de los actuadores de proceso industrial, sistemas de control de
1 rango de
Esta norma establece la clasificación de los productos, requisitos, métodos de prueba, normas de inspección, etiquetado, embalaje y almacenamiento de ordinario e inteligente actuadores eléctricos (en adelante referido como actuadores) para el proceso industrial, sistemas de control.
Esta norma es aplicable a varios tipos de actuadores, tales como cuartos de trazo recto de accidente cerebrovascular, y multi-vueltas impulsadas por motores eléctricos.
2 documentos de referencia Normativos
Los siguientes documentos son esenciales para la aplicación de este documento. Para todos los documentos de referencia con fecha, sólo la versión obsoleta se aplica a este documento. Para la fecha de los documentos de referencia, la versión más reciente (incluyendo todas las modificaciones a los pedidos) se aplica a este documento.
GB 3836.1 atmósferas Explosivas-Parte 1: requisitos Generales para los equipos
GB 3836.2 atmósferas Explosivas-Parte 2: Equipos protegidos por la carcaza a prueba de explosiones "d"
GB 4208-2008 shell nivel de protección (código IP)
GB/T 13384 General de condiciones técnicas para el Envasado de productos Electromecánicos
GB/T17626.2 compatibilidad Electromagnética de la prueba y de la tecnología de medición de prueba de inmunidad descarga electrostática
GB/T17626.3 compatibilidad Electromagnética de prueba y de medición de la tecnología de radio frecuencia del campo electromagnético de la radiación de prueba de inmunidad
GB/T17626.4 compatibilidad Electromagnética de la prueba y de la tecnología de medición de transitorios Eléctricos rápidos inmunidad a ráfagas de prueba
GB/T17626.5 compatibilidad Electromagnética de la prueba y de la tecnología de medición de sobretensión (shock) prueba de inmunidad
GB/T 17626.8 de compatibilidad Electromagnética de la prueba y de la tecnología de medición de energía del campo magnético de frecuencia de prueba de inmunidad
GB/T18271.1-2000 General de evaluación del desempeño de los métodos y procedimientos para el proceso de medición y dispositivos de control de la Parte 1: disposiciones Generales
GB/T 25480 Básica de las condiciones ambientales y métodos de prueba para el transporte y almacenamiento de instrumentación
GB/T 26815-2011 de la automatización Industrial, instrumento de la terminología del actuador de la terminología
3 Términos y definiciones
Los siguientes términos y definiciones, como se define en GB/T 26815-2011 se aplican a este documento.
3.1
Máximo control de par
El torque máximo que el actuador de control durante la operación.
3.2
Mínimo control de par
El par mínimo que el actuador pueda de control durante la operación.
3.3
Máximo control de empuje máximo control de empuje
El empuje máximo que el actuador pueda de control durante la operación.
3.4
Mínima de control de empuje mínimo de control de empuje
El mínimo empuje que el actuador de control durante la operación.
4 clasificación de Producto y parámetros básicos
4.1 clasificación del Producto
4.1.1 Clasificación por tipo de salida de desplazamiento
De acuerdo con el tipo de salida de desplazamiento del actuador, se divide en:
—Esquina de trazo;
--Recta de trazo;
--Varias vueltas.
4.1.2 Clasificación por método de control de la
De acuerdo con el método de control del actuador, se divide en:
--El tipo de conmutador;
--Ajustable tipo.
4.1.3 Clasificación por ambiente de trabajo
De acuerdo con el entorno de trabajo de la agencia ejecutiva, que se divide en:
--Tipo convencional;
--A prueba de explosión tipo.
Nota: Otros tipos que pueden ser utilizados según sea necesario.
4.1.4 Clasificación por unidad de motor en el modo
De acuerdo a la unidad de motor modo, se divide en:
--Mecánico con contactos;
--Electrónica sin contacto.
4.2 parámetros Básicos
4.2.1 ambiente de Trabajo condiciones
El actuador debe ser capaz de funcionar normalmente en las siguientes condiciones:
--Temperatura ambiente: -10℃~55℃, o -20℃~60℃, o -30℃~70℃;
--Humedad relativa: no más de 95%;
- La presión atmosférica: 86 kPa~106 kPa.
Nota: Para los actuadores utilizados en entornos especiales, como el ambiente de trabajo condiciones serán determinadas por el usuario en consulta con el fabricante.
4.2.2 condiciones Dinámicas
El actuador se utiliza las siguientes fuentes de alimentación para trabajar:
AC: de una Sola fase (2202322) V, trifásica (380±38) V; frecuencia (50±0.5 Hz; el contenido de armónicos es inferior al 5%.
DC: (24±2.4)V; (48±4.8)V; El pico rizado valor es menor que el 5% de la tensión de alimentación. Nota: Especial de las condiciones de alimentación son determinados por el usuario en consulta con el fabricante.
4.2.3 carga Nominal
La carga nominal del actuador es preferentemente seleccionado desde el siguiente número de la serie:
--Esquina de la carrera [unidad Nm (N·m)]: 6,16,40,100,250,600,1000,1600,2500,4000,
6000,10000,16000,... ;
--Recta de trazo [unidad de ganado (N)]: 250,400,600,1000,1600,2500,4000,6000,10000,16000,
25000,40000,60000,... ;
--Múltiples revoluciones [unidad Nm (N·m)]: 16, 40, 100, 160, 250, 400, 600, 1000, 1600, 2500,...
Nota: los Fabricantes pueden elegir otras series numéricas de acuerdo a la situación real.
4.2.4 Nominal accidente cerebrovascular
La calificación de accidente cerebrovascular valor del actuador se selecciona en primer lugar desde el siguiente número de la serie:
-Ángulo de carrera [en grados (°)]: 50,70,90,120,270, ... ;
--Recta de trazo [en milímetros (mm)]: 10,16,25,40,60,100,160,250,400,600,1000,... ;
--Múltiples revoluciones [la unidad de revoluciones (r)]: 5,7,10,15,20,40,80,120,...
Nota: los Fabricantes pueden elegir otras series numéricas de acuerdo a la situación real.
4.2.5 de la señal de Entrada
4.2.5.1 El ajuste del actuador da prioridad a las siguientes señales de entrada:
DC4 mA~20 mA.
Nota: Otras señales de entrada pueden ser seleccionados de acuerdo a las necesidades del usuario.
4.2.5.2 El actuador de conmutación se da prioridad a las siguientes señales de entrada:
Pasivo contactos, DC24V, AC220V.
Nota: Otras señales de entrada pueden ser seleccionados de acuerdo a las necesidades del usuario.
4.2.6 Número de conexiones
El sistema de trabajo del actuador es reversible intermitente de trabajo del sistema. Cuando la continuidad de la velocidad de conexión es de 20% a 80%, el número de conexiones por hora se toma en el siguiente número de sistema: 100,320,630,1200,1800.
Nota 1: El cambio en la continuidad de la tasa es la relación de la potencia del motor-en el tiempo del actuador con el motor apagado ciclo, expresado como un porcentaje.
Nota 2: El sistema de trabajo del mecanismo de ejecución, la continuidad de la tasa de conexión, y el número de conexiones por hora se puede especificar por separado de acuerdo a las necesidades del usuario.
5el funciones básicas de los sistemas inteligentes de actuador
5.1 la función de Visualización de
El inteligente actuador puede mostrar los parámetros de trabajo, información del estado operativo, la señal de consultas, la culpa de alarmas, etc. en Chino (o de otros métodos de acuerdo a los requisitos del usuario) a través de la interfaz humano-máquina.
5.2 ajuste de Parámetros de la función
El inteligente actuador puede establecer los parámetros de trabajo, tales como accidente cerebrovascular y el par de torsión a través de la interfaz humano-máquina, calibrar la 4mA a 20mA señal de entrada actual, y ajustar el 4mA a 20mA de corriente de la señal de salida.
5.3 En el sitio de la función de la configuración
El actuador inteligente tiene, al menos, los siguientes en el sitio de configuración de funciones:
--El interruptor de modo de contacto del estado de funcionamiento de la salida se puede configurar en el sitio;
--El modo de control remoto y en el lugar de control se puede configurar en el sitio.
5.4 Culpa de auto-diagnóstico y función de alarma.
El inteligente actuador de auto-diagnosticar las condiciones anormales (sobrecalentamiento del motor, la potencia fuera de fase, la válvula de estancamiento, etc.) durante la operación, y puede mostrar automáticamente información de fallo y de forma remota la salida de alarmas en el lugar.
5.5 función de Comunicación
El inteligente actuador puede ser equipado con una digital interface de comunicación para darse cuenta de bus de campo de control de la comunicación. El protocolo fieldbus los productos utilizados deben ser enviados a la correspondiente autorizado instituciones de ensayo para las pruebas para confirmar si cumplen con los correspondientes estándares de bus de campo.
5.6 Otras funciones
El actuador inteligente también puede tener las siguientes funciones:
Tiene no menos de 4 interruptor de salidas de contacto (incluyendo no menos de 2 interruptor de contacto con los productos cuyo estado no cambia después de la fuente de alimentación está apagada),
--Fuente de alimentación de la secuencia de fase de adaptación de la función;
--El sensor de posición da prioridad a los no-contacto de encoders absolutos que no requieren soporte de batería;
--El sensor de par puede medir continuamente el par de salida (de empuje) del actuador;
--Cuando el control de alta precisión y multi-etapa de control de velocidad variable son necesarios, actuadores con stepless (conversión de frecuencia) regulación de la velocidad de la función son los preferidos.
6 requisitos
6.1 Básica de los requisitos de rendimiento
El rendimiento básico del actuador debe cumplir con las disposiciones de la Tabla 1.
| Tabla 1 indicadores Técnicos de rendimiento básico | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Número de la cláusula | elemento | Los indicadores técnicos | |||||||||
| nombre | Unidad | Ajustable actuador | Interruptor de tipo de actuador | ||||||||
| Nivel de 0.5 | Nivel 1.0 | Nivel 1.5 | Nivel de 2.5 | Nivel de 0.5 | Nivel 1.0 | Nivel 1.5 | Nivel de 2.5 | Comentarios | |||
| 6.1.1 | Error básico | % | Que no exceda de ±0.5 | Que no exceda de ±1.0 | Que no exceda de ±1.5 | Que no exceda de ±2.5 | Si el actuador de conmutación no tiene una posición de la señal de salida, no hay tal requisito. | ||||
| 6.1.2 | Básicos de la desviación de la posición de la señal de salida | % | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 | |
| 6.1.3 | Volver | % | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 | |
| 6.1.4 | Zona muerta (cien de la gama de entrada | % | ≤0.5 | ≤1 | ≤1.5 | ≤2.5 | |||||
| 6.1.5 | Tiempo de retardo | S | ≤1 | ||||||||
| 6.1.6 | Nominal tiempo de viaje de error (porcentaje del nominal tiempo de viaje) | % | No exceder de ±20 | No exceder de ±20 | |||||||
| 6.1.7 | A partir de las características (cuando la tensión de alimentación cae a la negativa límite) | Arranque Normal | |||||||||
| 6.1.8 | Repetibilidad error de ictus de mecanismo de control | Varias revoluciones no exceder de ±5°, El ángulo en que el trazo no exceder de ±1°, La recta de trazo no exceder de ±1% | Sólo apto para cambiar de tipo de actuadores sin retroalimentación de la posición | ||||||||
| 6.1.9 | Resistencia de aislamiento | MQ | |||||||||
| 6.1.9.1 | Entre el terminal de entrada y el chasis | ≥20 | ≥50 | ||||||||
| 6.1.9.2 | Entre el terminal de entrada y el terminal de alimentación | ≥50 | ≥50 | ||||||||
| 6.1.9.3 | Entre los terminales de alimentación y el chasis | ≥50 | ≥50 | ||||||||
| 6.1.10 | Fuerza del aislamiento | Prueba de voltaje y frecuencia | Prueba de voltaje y frecuencia | La prueba de tensión entre el terminal de alimentación de la electrónica sin contacto impulsado por el actuador y el chasis es de acuerdo a los requisitos del fabricante | |||||||
| 6.1.10.1 | Entre el terminal de entrada y el chasis | 500 V,50 Hz | 1500V,50 Hz | ||||||||
| 6.1.10.2 | Entre el terminal de entrada y el terminal de alimentación | 1500 V,50 Hz | 1500 V,50 Hz | ||||||||
| 6.1.10.3 | Entre los terminales de alimentación y el chasis: (Sin desglose o arcos se produjo durante la prueba) | ||||||||||
--Tensión Nominal <60V | 500 V,50 Hz | 500 V,50 Hz | |||||||||
| --Tensión Nominal 60V~<130V | 1000 V,50 Hz | 1000 V,50 Hz | |||||||||
| --Tensión Nominal 130V ~ el<250V | 1500 V,50 Hz | 1500 V,50 Hz | |||||||||
| --Tensión Nominal 250V ~ el<660V | 2000 V,50 Hz | 2.000 V,50 Hz | |||||||||
| 6.1.11 | La subida de la temperatura | ℃ | ≤60 | ≤60 | |||||||
| 6.1.12 | A largo plazo la estabilidad de funcionamiento (después de 48 horas de la operación) | ||||||||||
| Error básico | Todavía debe cumplir con las disposiciones de la 6.1.1 | ||||||||||
| Básicos de la desviación de la posición de la señal de salida | Todavía debe cumplir con las disposiciones de la 6.1.2 | Todavía debe cumplir con las disposiciones de la 6.1.2 | |||||||||
| Volver | Todavía debe cumplir con las disposiciones de la 6.1.3 | Todavía debe cumplir con las disposiciones de la 6.1.3 | |||||||||
| Zona muerta | Todavía debe cumplir con las disposiciones de la 6.1.4 | ||||||||||
| A partir de las características | Todavía debe cumplir con las disposiciones de 6.1.7 | Todavía debe cumplir con las disposiciones de 6.1.7 | |||||||||
| 6.1.13 | Máximo y mínimo de control de torque y empuje repetibilidad error | % | No exceder de ±10 | ||||||||
| 6.1.14 | Manual-eléctrico mecanismo de conmutación | Manual-eléctrica de conmutación es conveniente y confiable, y el volante no debe ser girado cuando eléctrico | |||||||||
| 6.1.15 | Funciones básicas de smart type: | Sólo aplicable a los actuadores inteligentes | |||||||||
| a) la función de Visualización de | normal | ||||||||||
| b) el ajuste del Parámetro de la función | normal | ||||||||||
| c) En función de la configuración del sitio | |||||||||||
| 1) los contactos del Interruptor para el funcionamiento de la salida de estado | normal | ||||||||||
| 2) local y Remoto interruptor de la función de control de | normal | ||||||||||
| d) Falla de auto-diagnóstico y función de alarma : | |||||||||||
| 1) sobrecalentamiento del Motor alarma | normal | ||||||||||
| 2) Poder fuera de la fase de alarma | normal | ||||||||||
| e) fuente de Alimentación de la secuencia de fase de adaptación de la función | normal | ||||||||||
| f) Continua en función de medición de par de salida (de empuje) | normal | ||||||||||
| 6.1.16 | De ruido (sin carga) | ≤75 dB(a) | |||||||||
| 6.1.17 | Sin escalonamientos (conversión de frecuencia) regulación de la velocidad | Cuando no hay carga, la velocidad del actuador puede ser de forma continua reducción de la velocidad nominal para cerrar a cero; cuando con el 85% de la carga nominal, la velocidad del actuador puede ser reducido a menos de una décima parte de la velocidad nominal, y la velocidad de error no exceda de ±10% | Sólo apto para el paso de la frecuencia de conversión de la velocidad de control del actuador | ||||||||
6.2 requisitos de Rendimiento se ve afectado por la cantidad de impacto
Bajo la influencia de la cantidad de influencia, el rendimiento del actuador debe cumplir con las disposiciones de la Tabla 2.
| Tabla 2 indicadores Técnicos de la cantidad de impacto | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Número de la cláusula | elemento | Los indicadores técnicos | ||||||||
| nombre | Unidad | Ajustable actuador | Interruptor de tipo de actuador | |||||||
| Nivel de 0.5 | Nivel 1.0 | Nivel 1.5 | Nivel de 2.5 | Nivel de 0.5 | Nivel 1.0 | Nivel 1.5 | Nivel de 2.5 | |||
| 6.2.1 | Influencia de la temperatura ambiente (cada 10℃ cambio): | |||||||||
| --Salida de la gama baja de valor de cambio | % | ≤0.75 | ≤1 | ≤1.5 | ≤2.5 | ≤0.75 | ≤1 | ≤1.5 | ≤2.5 | |
| --Salida de alta gama cambio de valor | ≤0.75 | ≤1 | ≤1.5 | ≤2.5 | ≤0.75 | ≤1 | ≤1.5 | ≤2.5 | ||
| 6.2.2 | Efectos del calor y la humedad (temperatura de 40℃±2℃, humedad relativa 91% ~ el 95%, la resistencia de aislamiento después de 48 horas de prueba): | MQ | ||||||||
| --Entre el terminal de entrada y el chasis | ≥2 | ≥2 | ||||||||
| --Entre el terminal de entrada y el terminal de alimentación | ≥2 | ≥2 | ||||||||
| --Entre los terminales de alimentación y el chasis | ≥2 | ≥2 | ||||||||
| 6.2.3 | Influencia de la fuente de alimentación de voltaje (tensión de alimentación de los cambios del valor nominal para el positivo y negativo de los límites de tiempo, respectivamente): | % | ||||||||
| --Salida de la gama baja de valor de cambio | ≤0.75 | ≤1 | ≤1.5 | ≤2.5 | ≤0.75 | ≤1 | ≤1.5 | ≤2.5 | ||
| --Salida de alta gama cambio de valor | ≤0.75 | ≤1 | ≤1.5 | ≤2.5 | ≤0.75 | ≤1 | ≤1.5 | ≤2.5 | ||
| 6.2.4 | Impacto de la vibración mecánica: | La salida de los cambios en la gama baja y gama alta de los valores: | La salida de los cambios en la gama baja y gama alta de los valores: | |||||||
| --Vibración de frecuencia: 10Hz ~ el 150Hz | ≤1 | ≤1.5 | ≤2.5 | ≤3.5 | ≤1 | ≤1.5 | ≤2.5 | ≤3.5 | ||
| ——位移幅值:0.15 mm | 试验后:紧固件不松动、无机械损坏 | |||||||||
| — — 加速度幅值:20m/s² | 试验后:紧固件不松动、无机械损坏 | |||||||||
| 6.2.5 | 运输环境影响: --La temperatura: Alta temperatura: 55℃ Baja temperatura: -40℃ -- Punch Aceleración: 100m/s2±10m/s2 Frecuencia de repetición de pulso: 60 veces/min~100 veces/min Número de choques: 1000 veces±100 veces - Libre de caída de altura 100mm | Después de la prueba, si la posición cero se le permite ser ajustado, todavía debe cumplir 6.1.1~6.1.4、6.1.7、6.3 Las disposiciones de | Después de la prueba, si la posición cero se le permite ser ajustado, todavía debe cumplir 6.1.2、6.1.3、6.1.7、6.3 Las disposiciones de | |||||||
| 6.2.6 | Inmunidad a campo electromagnético de la radiofrecuencia de la radiación: La frecuencia de 80 MHz~1000 MHz, la distancia es de 3 m, la intensidad del campo es de 3 V/m, Un M1kHz, el 80% de modulación. Cuando el actuador se encuentra en el 50% de la carrera completa, la salida el valor de cambio de | % | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 |
| 6.2.7 | La inmunidad a los transitorios eléctricos rápidos en ráfagas: Más o menos 1kV se aplica a la fuente de alimentación terminal, y un 500 V tensión de prueba es aplicada a la señal de entrada del terminal. Cuando el mecanismo de ejecución se encuentra en el 50% de la carrera completa, la salida el valor de cambio de | % | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 |
| 6.2.8 | Sobretensión de choque) inmunidad: Cuando un voltaje de más o menos 1kV se aplica a la fuente de alimentación del terminal, y el mecanismo de ejecución se encuentra en el 50% de la carrera completa, la salida el valor de cambio de | % | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 |
| 6.2.9 | La descarga electrostática inmunidad: Descarga de contacto es de más o menos 4 kv, descarga de aire es de más o menos 8 kv. Cuando el actuador se encuentra en el 50% de la carrera completa, la salida el valor de cambio de | % | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 |
| 6.2.10 | La frecuencia de la energía del campo magnético de la inmunidad: La intensidad de campo magnético: 400A/m Prueba de dirección: X/Y/Z Cuando el actuador se encuentra en el 50% de la carrera completa, la salida el valor de cambio de | % | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 | ≤0.5 | ≤1.0 | ≤1.5 | ≤2.5 |
| Nota: 6.2.6~6.2.10 sólo son aplicables a los inteligentes de los actuadores. | ||||||||||
6.3 Apariencia
El metal de recubrimiento de la superficie y del recubrimiento de el actuador debe ser suave y intactos, y no habrá defectos tales como descamación, golpes y manchas. Los sujetadores no deben estar flojos, y las partes móviles deben ser flexibles y fiables. La pantalla del actuador con la función de visualización es visualmente claro, y no hay ningún daño a la fuga, la falta de caracteres, o ilegible el código.
6.4 Shell nivel de protección
El shell nivel de protección del actuador inteligente no es inferior a IP67 especificado en GB4208—2008, y la ordinaria del actuador no es inferior a IP65.
6.5 prueba de Explosión rendimiento
La categoría, nivel y temperatura de grupo de parallamas actuadores cumplir con las disposiciones de GB 3836.1 y GB 3836.2. Su producción y la certificación se efectuará de conformidad con los reglamentos nacionales pertinentes.
7 método de Prueba
7.1 condiciones de la Prueba
7.1.1 condiciones Ambientales
7.1.1.1 Referencia a las condiciones atmosféricas
La referencia de rendimiento del actuador debe ser probado bajo las siguientes condiciones atmosféricas:
--Temperatura ambiente: 20℃±2℃;
--Humedad relativa: 60%~70%;
- La presión atmosférica: 86kPa~106 kPa.
7.1.1.2 General de las condiciones atmosféricas
Cuando no hay ninguna necesidad de poner a prueba bajo condiciones atmosféricas de referencia, se recomienda a prueba bajo las siguientes condiciones atmosféricas:
--Temperatura ambiente: 15℃~35℃;
--Humedad relativa: 45% ~ el 75%%;
- La presión atmosférica: 86 kPa~106 kPa.
7.1.1.3 Otras condiciones ambientales
Además el campo magnético de la tierra, otros campos magnéticos externos y mecánicos de vibración debe ser insignificante.
7.1.2 condiciones Dinámicas
7.1.2.1 valor Nominal
De conformidad con las disposiciones de la 4.2.2.
7.1.2.2 Tolerancia
La tolerancia de las condiciones de la prueba es como sigue:
Tensión nominal: suelo 1%;
Frecuencia nominal: ±1%;
--El contenido de armónicos: menos de 5%.
7.2 disposiciones Generales para las pruebas
7.2.1 Durante la prueba, el producto objeto de la prueba debe estar en la posición normal de instalación, permitiendo que el poder esté encendido y precalentado durante 1h a estabilizar la temperatura interna del producto bajo prueba.
7.2.2 La posición cero del producto objeto de la prueba se le permite ser ajustado antes de la prueba, a menos que se especifique lo contrario, no deberá ser ajustado durante la prueba.
7.2.3 a Menos que se especifique lo contrario, el producto objeto de la prueba y relacionadas con el equipo de prueba debe ser estabilizado con la referencia de las condiciones de trabajo, a continuación se mide, y todas las condiciones de trabajo que puedan afectar a los resultados de las mediciones deberán ser observados y registrados.
7.2.4 La exactitud del instrumento estándar utilizado en la prueba debe ser indicado en el informe de la prueba, y su función básica de límite de error debe ser menor o igual a 1/3 del límite de error básico del producto objeto de la prueba, y su rango debe ser adaptado a la gama de la medida del valor.
7.2.5 Durante la prueba, la señal de entrada actual poco a poco debe aumentar o disminuir, y el enfoque y alcance el punto de prueba en la misma dirección para asegurar que no se rebasen se produce, y se especifica que la dirección de los trazos cuando la señal aumenta es la actitud positiva de accidente cerebrovascular, y la dirección de los trazos cuando la señal disminuye es el movimiento inverso.
7.2.6 a Menos que se especifique lo contrario, el eje de salida (rod) del actuador deberá ser cargado con una carga nominal durante la prueba, y la carga deberá ser un delantero de carga cuando la dirección de su acción es consistente con la dirección de movimiento del eje de salida (rod); por el contrario, será la inversa de la carga.
7.2.7 a Menos que se especifique lo contrario, la prueba del punto de medición será del 0 de la gama de entrada%、25%、50%、75%、100% Cinco puntos, cada punto de prueba debe ser medido en tres ocasiones en la dirección de la señal de entrada creciente y decreciente. Inspección de la fábrica permite que cada punto de prueba para medirse una vez.
7.2.8 a Menos que se especifique lo contrario, la prueba de impacto sólo puede variar dentro del rango especificado de las condiciones de trabajo implicados, y otras condiciones de trabajo permanecerá constante en las condiciones de referencia.
7.2.9 Cuando es imposible realizar una prueba de impacto con la referencia de las condiciones atmosféricas, debido a las limitaciones de las condiciones, la prueba puede llevarse a cabo bajo las condiciones atmosféricas de la prueba general.
7.2.10 a Menos que se especifique lo contrario, el nominal intervalo de carrera del producto objeto de la prueba durante la prueba se especifica como: más de 10 vueltas; angular de ictus es de 90°; recta de trazo es de 16mm.
7.3 error Básico
Poco a poco aumentar o disminuir la señal de entrada y registro de la señal de entrada y el valor de accidente cerebrovascular valor de la salida del eje (varilla) en el avance y retroceso de trazo de las direcciones, y calcular el error básico de acuerdo a la ecuación (1).

En la fórmula:
- δ: error Básico,%;
- L1: La carrera de valor de la salida del eje (varilla), en grados (°), milímetros (mm), o revoluciones (r);
- Lo: El valor teórico de la carrera del eje de salida (la barra), en grados (·), milímetros (mm), o revoluciones (r);
- L: La calificación de accidente cerebrovascular valor de la carrera completa del eje de salida (la barra), en grados (°), milímetros (mm) o revoluciones (r)
Confirmar si el error básico de cada uno de los valores de medición en cada punto de medición excede las disposiciones de la 6.1.1.
7.4 Básicos de la desviación de la posición de la señal de salida
Conecte la posición de la señal de salida del actuador externo 250Ω impedancia de carga y ejecuta a los "completamente off" posición para ajustar la posición de la señal de salida.Es de 4mA; ejecutar el actuador a la "totalmente abierta" de la posición, ajustar la posición de la señal de salida de 20 ma y, a continuación, ejecute el actuador a la posición positiva.、La posición de salida de la señal de valor de cada punto se registra por separado en el reverso de dirección de los trazos, y la base de la desviación se calcula de acuerdo a la ecuación (2).

En la fórmula:
- 00: básico desviación de la posición de la señal de salida,%;
- Io: El valor teórico de la posición de la señal de salida en miliamperios (mA);
- I1: El valor de medición de la posición de la señal de salida en miliamperios (mA);
- Yo: el rango de La posición de la señal de salida, la unidad es milliampere (mA) (a las 4 de la mA~20 mA, I=16 ma; 0 MA~20 mA, I=20 ma).
Confirmar si el básico de la desviación de cada valor medido en cada punto de medición excede las disposiciones de 6.1.2.
7.5 devolución
La histéresis del actuador está determinado por el valor absoluto de la máxima diferencia algebraica entre los errores básicos del avance y retroceso de la carrera de cada punto de prueba se mide en 7.3 y 7.4.
7.6 zona Muerta
La zona muerta de los ajustable actuador debe ser medido a 25%, 50% y 75% de la calificación de accidente cerebrovascular.
La medición de los pasos son como sigue:
Lentamente cambio (aumento o disminución) de la señal de entrada hasta que la salida del eje (varilla) tiene un perceptible cambio de trazo, registro de la señal de entrada valor de I (mA) en este momento;
--Luego, lentamente, cambiar (aumentar o disminuir) la señal de entrada en la dirección opuesta hasta que la salida del eje (varilla) tiene un perceptible cambio de trazo, y grabar la señal de entrada valor de I2 (mA) en este momento.
Calcular la zona muerta de acuerdo a la ecuación (3).

En la fórmula:
- :: Zona muerta, %.
7.7 Tiempo de retardo
Una señal de paso de 15% de la gama de entrada se aplica a la señal de entrada del terminal de la ajustable actuador, y la señal de entrada de la curva y la posición de la señal de salida de la curva se registran con un osciloscopio para observar si la diferencia de tiempo desde el valor inicial de la señal de entrada para el inicio de la señal de salida supera las disposiciones de 6.1.5.
7.8 Nominal tiempo de viaje de error
Aplicar un 45% a 55% de la carga nominal del actuador, agregar un paso de la señal suficiente para mover el nominal trazo del eje de salida (rod) del actuador, y registrar el tiempo cuando el eje de salida (varilla) se mueve a la calificación de accidente cerebrovascular. Calcular el rango de tiempo de viaje de error de acuerdo a la fórmula (4):

En la fórmula:
- t: Nominal tiempo de viaje de error,%;
- t1: El tiempo medido de la tensión nominal de trazo del eje de salida (la barra), en segundos (s);
- t: El valor teórico de la tensión nominal de viaje en el tiempo, en segundos (s).
7.9 a Partir de las características
La carga nominal en la dirección opuesta se aplica a la salida del eje (varilla) del actuador, y la fuente de alimentación de voltaje se cambia el valor de límite inferior y, a continuación, una señal de entrada se aplica a observar si el actuador se puede iniciar normalmente.
7.10 Repetibilidad error de ictus de mecanismo de control
El actuador con un ictus de mecanismo de control se aplica el 25% a 30% de la carga nominal, a su salida del eje (varilla), de modo que el actuador se alterna el avance y retroceso de la carrera 5 veces, y observa y registra el trazo valor de la salida del eje (varilla) cuando el accidente cerebrovascular mecanismo de control de los interruptores. Utilizando el valor promedio de los cinco valores registrados en la base de valor, calcular el valor de error de cada valor registrado y el valor de la base, y determinar si el valor calculado de error supera las disposiciones de 6.1.8.
7.11 resistencia de Aislamiento
Bajo las condiciones de la atmósfera de la prueba general y cuando el actuador está sin carga, desconecte la fuente de alimentación del producto objeto de la prueba, de modo que el interruptor de encendido está en la posición on, el terminal de entrada y el terminal de alimentación están en cortocircuito por separado, y luego usar un medidor de resistencia de aislamiento con una tensión de CC de 500V para medir la resistencia entre los terminales especificados en 6.1.9.Si la resistencia de aislamiento supera las disposiciones de 6.1.9.
7.12 fuerza del Aislamiento
Bajo las condiciones de la atmósfera de la prueba general y cuando el actuador está sin carga, desconecte la fuente de alimentación del producto objeto de la prueba, de modo que el interruptor de encendido está en la posición on, el terminal de entrada y el terminal de alimentación están en cortocircuito por separado y, a continuación, de acuerdo a la frecuencia y el voltaje especificado en 6.1.10, la tensión de prueba se incrementa lentamente a partir de la cero a la specifiedValue, y mantener durante 1 minuto, observando si hay ruptura y el arco de vuelo fenómeno, luego, lentamente, caída de la tensión de prueba a cero, desconecte la prueba de la fuente de alimentación.
7.13 aumento de la Temperatura
Antes de la prueba, el uso de un puente para medir el estado frío resistencia del motor y el poder transformador de los devanados, y luego medir el estado caliente la resistencia del motor y el poder transformador de los devanados inmediatamente después de la operación continua durante 12 horas según el método de 7.14.
De acuerdo con la ecuación (5), el aumento de la temperatura del bobinado del motor y la potencia de vueltas del transformador se calcula por separado.

En la fórmula:
- P: aumento de la Temperatura, en grados Celsius (ºc)
- R₂: La resistencia térmica de la bobina, en euros (Ω);
- R₁: El frío, la resistencia de la bobina, la unidad es el euro (9);
- T1: la temperatura de La habitación cuando la medición de la resistencia en frío, en grados Celsius (°c);
- T₂: la temperatura de La habitación en la que la resistencia térmica se mide en grados Centígrados (ºc).
O conecte el sensor de temperatura de la superficie exterior del motor en el estado frío durante 1 min y registrar su valor de temperatura Tj, y, a continuación, utilizar el mismo sensor para medir el valor de temperatura del sensor de temperatura Tj inmediatamente después de ejecutar de forma continua durante 12 horas según el método de 7.14, a continuación, el aumento de la temperatura Q=TTi-Ti.
O usar un termómetro de infrarrojos para medir la temperatura de la superficie exterior del valor de Ti del motor en el estado frío y, a continuación, utilizar el mismo termómetro para medir la temperatura de la superficie exterior del valor T₂ del motor en el estado caliente inmediatamente después de ejecutar de forma continua durante 12 horas según el método de 7.14, a continuación, el aumento de la temperatura Q=TTi-Ti.
7.14 a Largo plazo de la estabilidad
Hacer que el actuador dentro de la calificación de accidente cerebrovascular y de aplicar el 30% de la carga nominal, por lo que la continuidad de la velocidad de conexión es de 20% a 80%, y el número de conexiones por hora es de ejecución de 48 horas de acuerdo a los requerimientos de 4.2.6. Después de la prueba, se confirma si el actuador se cumple con los requisitos de 6.1.12.
7.15 Máximo y mínimo de control de torque y empuje repetibilidad error
El procedimiento de prueba es como sigue:
a) Instale el actuador en el banco de pruebas, y se establece la protección del par de valor para el máximo control de par máximo o de control de empuje en el encendido y apagado de las direcciones, respectivamente.Valor de fuerza, iniciar el actuador y poco a poco la carga hasta que la "sobre-par" o "sobre-empuje" acción de alarma, medir el par de salida o de empujeValor de fuerza. El encendido y apagado de las direcciones se miden tres veces cada uno, y el valor promedio que se toma como base el valor de la salida de par o fuerza de empuje.
b) Instale el actuador en el banco de pruebas, establecer la par valor de la protección a la mínima de control de par o de control mínimo empuje valor en el encendido y apagado de las direcciones, iniciar el actuador y poco a poco la carga hasta que la "sobre-par" o "sobre-empuje" acción de alarma, medir la salida de par o Fuerza de empuje de valor. El encendido y apagado de las direcciones se miden tres veces cada uno, y el valor promedio que se toma como base el valor de la salida de par o fuerza de empuje.
c) Calcular la repetición de errores de la de control de par de torsión o inclinación de acuerdo a la ecuación (6).

En la fórmula:
- δ0: La repetición del error de control de par o de empuje,%
- Ms:La medida de la salida el valor del par en el ganado bovino (N·m), o el empuje de valor ganado (N).:
- Mz: El valor de la base de que el par de salida, en nm (N·m), o el valor de la base de empuje, en nm (N).
7.16 Manual-eléctrico mecanismo de conmutación
El procedimiento de prueba es como sigue:
a) Sin carga de conmutación de verificación. Cambiar el actuador de electric estado de manual, gire el volante para que el eje de salida gira en sentido horario y en sentido antihorario no menos de un círculo; a continuación, ejecute el actuador eléctricamente de manera que el eje de salida gira hacia adelante y en reversa no menos de un círculo. Repita cada dos veces para confirmar si cumple con las disposiciones de 6.1.14.
b) interruptor de Carga de verificación. Instale el actuador en el banco de pruebas, ajuste la protección de torsión en el encendido y apagado de las direcciones para el máximo control de par, ejecute el actuador eléctrico y poco a poco la carga hasta que el par interruptor es activado y, a continuación, repita la prueba a) sin descarga para confirmar si se cumple con los requisitos de 6.1.14.Reglamento.
7.17 funciones Básicas de tipo inteligente
7.17.1 de función de la Pantalla
Compruebe si la pantalla de información, tales como parámetros de trabajo, información del estado operativo, y la culpa de alarmas es normal a través de la interfaz hombre-máquina, y si el contenido de la pantalla es completa y clara.
7.17.2 de ajuste de Parámetros de la función
Sin la apertura de la toma de la cubierta, establecer los parámetros de trabajo, tales como accidente cerebrovascular y el par, calibrar la señal de entrada actual y ajustar la señal de salida a través de la interfaz hombre-máquina para confirmar si el ajuste del parámetro de la función es normal.
7.17.3 En el sitio de la función de la configuración
Sin la apertura de la toma de la cubierta, a través de la interfaz hombre-máquina, el interruptor de cuatro salidas de contacto de el actuador se establecen para abrir y cerrar en el lugar, abierto y desconectar en el lugar, cerrar y desconectar en el lugar, y cerrar y desconectar en el lugar. Iniciar el actuador a las posiciones on y off y compruebe si el interruptor de 4 puntos de contacto de salida cumple con los requisitos de configuración. Para los contactos del interruptor de cuyo estado no cambia después de la fuente de alimentación está apagado, la salida también debe verificar si se cumple con los requisitos después de desconectar la fuente de alimentación.
Establecer la par valor de la protección del actuador con el 40% y el 100% de su par nominal valor, respectivamente, de iniciar el actuador y poco a poco la carga hasta que el conjunto se supera el valor, compruebe si el par interruptor voltea de inmediato, si la acción es normal, repetir tres veces, y si la acción se puede revertir de inmediato, cumple todos los requisitos.
Bajo condiciones de carga, el modo de control del actuador está ajustado a "correr" y "hold", respectivamente, y el actuador está conectado y controlado por la perilla en el sitio panel de operación del actuador para confirmar si su trabajo es normal.
Establecer el modo de control remoto del actuador (o conexión externa) a "correr" y "hold", respectivamente, y cambiar el actuador a través de una señal externa de acuerdo a los requerimientos del fabricante para confirmar si su trabajo es normal.
7.17.4 Culpa de auto-diagnóstico y función de alarma.
Bajo condiciones de carga, el actuador de energía, la eléctrica tapa está abierta, y la temperatura del motor pinout se desconecta el sistema de control del actuador, y el sobrecalentamiento del motor de la alarma es observado por el actuador. Además, el actuador se coloca en la cámara de prueba de temperatura, y la temperatura se ajusta a la temperatura del punto de la alarma de sobrecalentamiento del motor especificado por el fabricante, con una tolerancia de ±5℃. Después de 2h, compruebe si el interruptor de temperatura del motor está en la acción. Para el actuador de las tres fases de la fuente de alimentación, bajo la condición de encendido, desconectar cualquier línea de la fuente de alimentación del actuador para confirmar si el actuador tiene una alarma correspondiente.
7.17.5 fuente de Alimentación de la secuencia de fase de adaptación de la función
Para actuadores inteligentes que utilizan una alimentación trifásica, arbitrariamente cambiar la secuencia de fase de la fuente de alimentación primaria para confirmar si el actuador está en la dirección correcta de un sitio remoto y el interruptor de control.
7.17.6 Continua de la función de medición de par de salida (de empuje)
Coloque el actuador en el banco de pruebas, cambiar continuamente el par (de empuje) aplicada durante la operación del actuador, y observar si el par (de empuje) valor que se muestra en la interfaz hombre-máquina del actuador cambia continuamente.
7.18 Ruido
Bajo la condición de que el interior de las puertas y ventanas están bien cerradas y en el interior el ruido ambiental no exceda de 45dB, el actuador se activa en ausencia de carga, y la apertura y cierre de las direcciones se repite dos veces. El uso de un medidor de nivel de sonido para medir el ruido del actuador a una distancia de 1m desde la superficie del actuador, y comprobar si el ruido cumple con los requisitos de 6.1.16.
7.19 Continuo (conversión de frecuencia) regulación de la velocidad
Cuando el conjunto actuador alcanza la posición de destino, la desaceleración se emplea el control de la no-carga a partir del actuador ejecuta a la velocidad nominal a un cierto límite de posición, y el tacómetro se utiliza para medir el cambio de velocidad cuando el actuador está en su lugar.
Después de agregar el 85% de la carga nominal del actuador, iniciar el actuador para que se ejecute a una décima parte de la velocidad nominal, comprobar si la operación en el encendido y apagado de las direcciones es normal, y si la velocidad de error durante la operación cumple con los requisitos de 6.1.17.
7.20 Impacto de la temperatura ambiente
Bajo condiciones de carga, el actuador se coloca en la temperatura de la cámara de prueba. La prueba de la temperatura y de la secuencia de prueba es como sigue:
--Actuador con una temperatura ambiente de trabajo de -10℃~55℃:
20℃ (referencia)、40℃、55℃、20℃、0℃、 -10℃、20℃;
--Actuador con una temperatura ambiente de trabajo de -20℃~60℃:
20℃ (referencia)、40℃、60℃、20℃、0℃、 -20℃、20℃;
--Actuador con una temperatura ambiente de trabajo de -30℃~70℃:
20℃ (referencia)、45℃、70℃、20℃、0℃、 -30℃、20℃。
Si las partes interesadas negociar y acordar, la prueba sólo puede ser llevado a cabo en las cuatro temperaturas de 20 ºc (referencia), la temperatura más alta, la temperatura más baja, y 20℃. La tolerancia en cada temperatura es de ±2℃, y debe mantenerse durante 2 h a cada temperatura de punto. Después de la interna de la estabilidad térmica de los productos se logra, la gama baja y gama alta de los valores del control proporcional y la posición de la señal de salida se mide en el 0% y el 100% de la carrera completa, respectivamente. La gama baja y gama alta de los valores de la señal de salida. Tomar el valor promedio de las tres mediciones en cada temperatura de punto, y calcular de acuerdo a la ecuación (7) y la ecuación (8) cuando la temperatura de cada uno de los dos vecinos de cambios por 10℃, la salida de la cantidad de cambio en la gama baja de valor y de alto valor, y confirmar si el resultado cumple con los requisitos de 6.2.1.


En la fórmula:
- △T0: Por cada 10℃ cambio de temperatura, la cantidad de cambio en la baja y de gama alta de los valores de la posición de la señal de salida,%;
- XTi: La baja y de alta gama de valores de la señal de salida en la medición de la posición en la adyacente de la temperatura, en miliamperios (mA);
- XT0: La baja y de alta gama de valores de la señal de salida en la medición de la posición en la temperatura inicial, en miliamperios (mA);
- Ti: Adyacente de la temperatura, en grados Celsius (°c);
- T0: La partida de la temperatura, en grados Celsius (°c);
- △T1: Por cada 10℃ cambio de temperatura, la cantidad de cambio en el bajo y de alta gama de valores de la salida del eje (varilla),%;
- LTi: Las altas y bajas de fin de carrera de los valores del eje de salida (la barra), medido en adyacentes temperaturas, en grados (°), milímetros (mm), y de las revoluciones (r);
- LT0: Las altas y bajas de fin de carrera de los valores del eje de salida (la barra), medido en el punto de partida de la temperatura, en grados (°), milímetros (mm), y de las revoluciones (r).
7.21 Efectos del calor y la humedad
Bajo condiciones de carga, el actuador se coloca en un calor y la humedad de la cámara de prueba, la temperatura es la primera vez que se planteó a 40℃±2℃, y, a continuación, la humedad relativa se ajusta a 91%~95%, y se mantuvo durante 48 H.
Después de que el calor y la humedad de la prueba, el actuador es retirada inmediatamente del calor y la humedad del cuadro, y la resistencia de aislamiento entre los terminales especificados en 6.2.2 se mide según el método de 7.11.
7.22 Impacto de la tensión de alimentación
Bajo condiciones de carga, el voltaje de alimentación del actuador de ajuste de la tensión nominal, valor para el límite superior e inferior de los valores, y los de gama baja y gama alta de los valores del control proporcional y la posición de la señal de salida se mide en el 0% y el 100% de la carrera completa, respectivamente.
Tomar el valor promedio de las tres mediciones en cada punto de medición, calcular el límite inferior y el rango de cambios de acuerdo a la ecuación (9) y la ecuación (10), y confirmarSi el resultado cumple con los requisitos de 6.2.3.
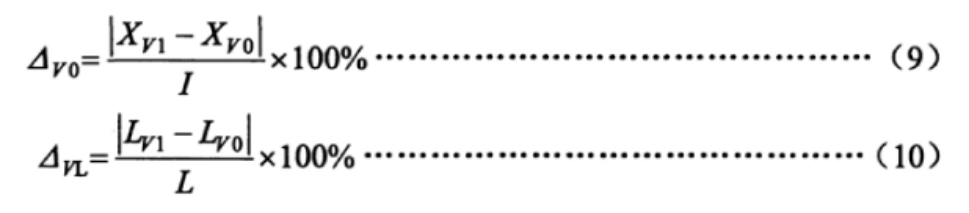
En la fórmula:
- △V0: Cuando la tensión de alimentación de los cambios, la cantidad de cambio en la baja y de gama alta de los valores de la posición de la señal de salida,%;
- XV1: La baja y de alta gama de valores de la señal de salida en la medición de la posición en el límite superior e inferior de los voltajes en miliamperios (mA);
- XV0: La baja y la alta gama de los valores de la medición de la posición de la señal de salida a la tensión nominal, en miliamperios (mA);
- △VL: Cuando la tensión de alimentación de los cambios, la cantidad de cambio en el bajo y de alta gama de valores de la salida del eje (varilla),%;
- LV1: Las altas y bajas de fin de carrera de los valores del eje de salida (la barra), medido en la parte superior y el límite inferior de los voltajes, en grados (°), milímetros (mm), y de las revoluciones (r);
- LV0: Las altas y bajas de fin de carrera de los valores de la salida del eje (varilla) medido a la tensión nominal, en grados (°), milímetros (mm), y de las revoluciones (r).
7.23 Impacto de vibraciones mecánicas
Bajo condiciones de carga, el actuador se encuentra instalado en el banco de pruebas de vibración, y el actuador se ejecuta a 0% y el 100% de la carrera completa, respectivamente, a una frecuencia de 10Hz~150Hz, el barrido de frecuencia de vibración se lleva a cabo en tres direcciones perpendiculares entre sí, el punto de resonancia se encuentra y, a continuación, la frecuencia de resonancia se lleva a cabo por separado.Una prueba de vibración de 30 minutos, si no hay ningún punto de resonancia, una prueba de vibración de 30 minutos se realiza a una frecuencia de 150 hz.
Durante la prueba, medir la salida de gama baja y gama alta de los valores del actuador, calcular los cambios en la gama baja y gama alta de los valores de acuerdo a la ecuación (11) y la ecuación (12), y confirmar si los resultados cumplen con los requisitos de 6.2.4.
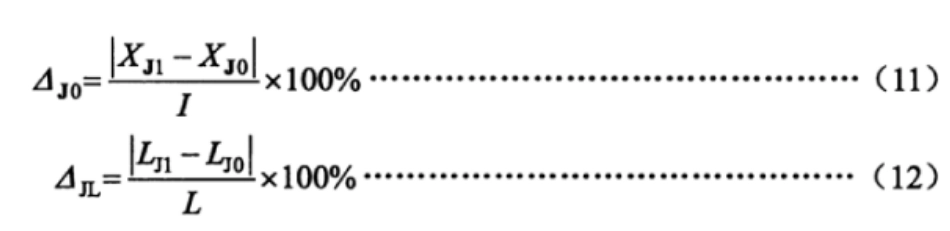
En la fórmula:
- △J0:Durante la vibración mecánica, la cantidad de cambio en la baja y de gama alta de los valores de la posición de la señal de salida,%;
- XJ1: La baja y de alta gama de valores de la señal de salida de la medición de la posición en la prueba de vibración, en milliampere (mA):
- XJ0:La baja y de alta gama de valores de la señal de salida en la medición de la posición antes de la prueba de vibración, en milliampere (mA);
- △JL: La cantidad de cambio en el bajo y de alta gama de valores de la salida del eje (varilla) durante la vibración mecánica,%;
- LJ1: Las altas y bajas de fin de carrera de los valores del eje de salida (la barra), medido en la prueba de vibración, en grados (°), milímetros (mm), y de las revoluciones (r);
- LJ0: Las altas y bajas de fin de carrera de los valores de la salida del eje (varilla) medido antes de la prueba de vibración, en grados (°), milímetros (mm), y de las revoluciones (r).
7.24 el impacto Ambiental del transporte
La temperatura, el impacto y la caída libre de las pruebas se llevan a cabo de acuerdo con los parámetros de ensayo especificado en 6.2.5 de la presente norma y los métodos de GB/T 25480. Después de la prueba, la posición cero se le permite ser ajustado y, a continuación, la prueba de rendimiento y la apariencia de la inspección se lleva a cabo por separado.
Nota: Cuando la temperatura ambiente ensayo de impacto ha sido probado en 55℃ (o superior a 55℃), la prueba de alta temperatura pueden ser exentos.
7.25 Inmunidad a campo electromagnético de la radiofrecuencia de la radiación
Bajo condiciones de carga, el actuador se mueve hasta una posición de 50% de la carrera completa, y de acuerdo a los requisitos de GB/T17626.3, el actuador es sometido a un campo electromagnético irradiado con una frecuencia en el rango de 80 MHz a 1000 MHz y una intensidad de 3V/m a una distancia de 3 m del actuador.La radiación, en este momento, observar y registrar la cantidad de cambio en la retroalimentación de la posición de la señal de salida o el trazo valor de la salida del eje (varilla), y confirmar si el valor cumple con los requisitos de 6.2.6 en la presente norma.
7.26 la Inmunidad a los transitorios eléctricos rápidos en ráfagas
Bajo condiciones de carga, el actuador se mueve hasta una posición de 50% de la carrera completa, y, a continuación, de acuerdo a los requisitos de GB/T 17626.4, más o menos 1000V se aplica a la fuente de alimentación terminal, y más o menos 500 V tensión de prueba es aplicada a la señal de entrada del terminal. En este momento, observar y registrar la retroalimentación de la posición de la señal de salida o el trazo valor de la salida del eje (varilla).Para confirmar si su valor cumple con los requisitos de 6.2.7 en la presente norma.
7.27 Sobretensiones (shock) inmunidad
Bajo condiciones de carga, el actuador se mueve hasta una posición de 50% de la carrera completa, y un voltaje de más o menos 1kV se aplica entre el cable de alimentación del actuador y de la tierra de acuerdo a los requisitos de GB/T 17626.5. En este momento, observar y registrar la retroalimentación de la posición de la señal de salida o la cantidad de cambio en el trazo valor de la salida del eje (varilla) para confirmWhether su valor cumple con los requisitos de 6.2.8 en la presente norma.
7.28 descarga Electrostática inmunidad
Bajo condiciones de carga, el actuador se mueve hasta una posición de 50% de la carrera completa. De acuerdo a los requisitos de GB/T 17626.2, en la cubierta exterior del actuador está conectado a tierra de forma fiable, y un resultado positivo o negativo de 4 kv descarga de contacto se aplica para el actuador y, a continuación, positivo o negativo 8 kv descarga de aire se aplica. En este momento, observar y registrar la retroalimentación de la posición de la señal de salida orThe cantidad de cambio en el trazo valor de la salida del eje (varilla), confirmar si su valor cumple con los requisitos de 6.2.9 en la presente norma.
7.29 la frecuencia de la Energía del campo magnético de la inmunidad
Bajo condiciones de carga, el actuador se coloca en un campo magnético externo soporte de la prueba, y el actuador se mueve hasta el 50% de la carrera completa. La intensidad del campo magnético es de 400 A/m y la dirección de la prueba es X/Y/Z. La prueba se lleva a cabo conforme a los requisitos de GB/T17626.8. En este momento, observar y registrar la retroalimentación de la posición de la señal de salida o el cambio en el trazo valor de la salida del eje (varilla), y confirmar si el valor cumple con los requisitos de 6.2.10 en la presente norma.
7.30 Apariencia
El uso de la inspección visual y la mano-sensación de métodos para comprobar si la superficie externa es lisa y plana, si hay grietas, rebabas, golpes y otros defectos que afecten a la aparición de calidad, si el revestimiento de la superficie está conectado firmemente, plana, lisa, de color uniforme, sin manchas de aceite, las arrugas y otros daños mecánicos. La pantalla del actuador con la función de visualización es visualmente claro, y no hay ninguna falta de caracteres.
7.31 Shell nivel de protección
Conducta o IP65 IP67 shell de protección de pruebas de acuerdo con los métodos especificados en GB 4208-2008.
7.32 a prueba de Explosión rendimiento
De acuerdo a las disposiciones de GB 3836.1 y GB3836.2, que será enviado a la unidad de inspección reconocida por el estado para la prueba.
8 reglas de Inspección
8.1 inspección de la Fábrica
Cada actuador deberá pasar la inspección de la calidad del fabricante del departamento de inspección, y el departamento de inspección emitirá un certificado del producto antes de salir de la fábrica. La inspección de la fábrica de los artículos están en conformidad con las disposiciones de la Tabla 3.
8.2 Tipo de inspección
Tipo de inspección debe llevarse a cabo en una de las siguientes situaciones:
--Los estereotipos y la identificación de nuevos productos de prueba;
--Por que normalmente es producida productos, hay cambios importantes en la estructura, los materiales y la tecnología, que pueden afectar el rendimiento del producto.;
--Los nacionales pertinentes de los departamentos de poner adelante a los requisitos para el tipo de inspección;
El producto ha sido descontinuado por más de un año;
--El producto ha sido producido continuamente por más de tres años.
El tipo de inspección que los artículos estén en conformidad con las disposiciones de la Tabla 3 de esta norma.
Durante la inspección de tipo, el método de muestreo deberán cumplir con las disposiciones de 6.7 en GB/T 18271.1—2000.
| Tabla 3 Elementos De Inspección | |||||||
|---|---|---|---|---|---|---|---|
| Número de serie | elemento | Inspección de la fábrica | Tipo de inspección | ||||
| Ajustable tipo | Tipo de interruptor | Ajustable tipo | Tipo de interruptor | Requisitos técnicos | Método de prueba | ||
| 1 | Error básico | △ | △ | △ | 6.1.1 | 7.3 | |
| 2 | Básicos de la desviación de la posición de la señal de salida | △ | △ | △ | △ | 6.1.2 | 7.4 |
| 3 | Volver | △ | △ | △ | △ | 6.1.3 | 7.5 |
| 4 | Zona muerta | △ | — | △ | — | 6.1.4 | 7.6 |
| 5 | Tiempo de retardo | — | — | △ | — | 6.1.5 | 7.7 |
| 6 | Clasificados de viajes error de tiempo de | △ | △ | △ | △ | 6.1.6 | 7.8 |
| 7 | A partir de las características | — | — | △ | △ | 6.1.7 | 7.9 |
| 8 | Repetibilidad error de ictus de mecanismo de control | — | — | △ | △ | 6.1.8 | 7.1 |
| 9 | Resistencia de aislamiento | △ | △ | △ | △ | 6.1.9 | 7.11 |
| 10 | Fuerza del aislamiento | △ | △ | △ | △ | 6.1.10 | 7.12 |
| 11 | La subida de la temperatura | — | △ | △ | 6.1.11 | 7.13 | |
| 12 | A largo plazo la estabilidad de funcionamiento | — | — | △ | △ | 6.1.12 | 7.14 |
| 13 | Máximo y mínimo de control de torque y empuje repetibilidad error | △ | △ | △ | △ | 6.1.13 | 7.15 |
| 14 | Manual-eléctrico mecanismo de conmutación | △ | △ | △ | △ | 6.1.14 | 7.16 |
| 15 | Funciones básicas de tipo inteligente | * | * | * | * | 6.1.15 | 7.17 |
| 16 | el ruido | — | △ | △ | 6.1.16 | 7.18 | |
| 17 | Sin escalonamientos (conversión de frecuencia) regulación de la velocidad | △ | △ | △ | △ | 6.1.17 | 7.19 |
| 18 | Temperatura ambiente de impacto | — | △ | △ | 6.2.1 | 7.2 | |
| 19 | Efectos del calor y la humedad | △ | △ | 6.2.2 | 7.21 | ||
| 20 | Influencia de la tensión de alimentación | △ | △ | 6.2.3 | 7.22 | ||
| 21 | Impacto de las vibraciones mecánicas | △ | △ | 6.2.4 | 7.23 | ||
| 22 | Transporte de impacto ambiental | △ | △ | 6.2.5 | 7.24 | ||
| 23 | Inmunidad a campo electromagnético de la radiofrecuencia de la radiación | * | * | 6.2.6 | 7.25 | ||
| 24 | La inmunidad a los transitorios eléctricos rápidos en ráfagas | * | * | 6.2.7 | 7.26 | ||
| 25 | Sobretensión de choque) inmunidad | * | * | 6.2.8 | 7.27 | ||
| 26 | La descarga electrostática inmunidad | — | — | * | * | 6.2.9 | 7.28 |
| 27 | La frecuencia de la energía del campo magnético de la inmunidad | — | * | * | 6.2.10 | 7.29 | |
| 28 | apariencia | △ | △ | △ | △ | 6.3 | 7.3 |
| 29 | Shell nivel de protección | — | — | △ | △ | 6.4 | 7.31 |
| 30 | A prueba de explosión rendimiento | — | △ | △ | 6.5 | 7.32 | |
| Nota: "△" indica que los elementos que deben ser inspeccionados, "uno" indica que los elementos que no son inspeccionadas, y "*" indica que es aplicable únicamente a los inteligentes de los actuadores. | |||||||
9 Marcado, embalaje y almacenamiento
9.1 Logotipo
9.1.1 Una placa de identificación debe ser instalado en el lugar obvio del actuador, y la placa de datos debe indicar:
--El nombre del fabricante y la marca de;
--Nombre del producto y número de modelo;
--Principales parámetros técnicos del producto;
--Temperatura ambiente de operación;
--Nivel de protección;
--El uso de condiciones de suministro de energía (voltaje, corriente y frecuencia);
--Fecha de fabricación;
--Número de fabricación.
9.1.2 además De indicar el contenido especificado en 9.1.1 en la placa de características de la explosión, a prueba de actuador, también debe ser indicado:
--La explosión, a prueba de logotipo de la prescrita por el estado, está marcada en la parte superior derecha de la placa de características;
--Prueba de explosión grado;
--A prueba de explosión del número de certificado.
9.2 Embalaje
9.2.1 Embalaje
Los productos se entregan en cajas deben ser empacados de acuerdo con los requisitos de GB/T13384. La caja de embalaje debe ser acompañada de un certificado del producto, técnicas pertinentes de los documentos y la lista de embalaje.
9.2.2 lista de Empaque
La lista de empaque debe incluir los siguientes contenidos y ser sellada con el sello de la fábrica de inspector:
--Nombre y dirección del fabricante;
--Nombre del producto y número de modelo;
- El nombre y la cantidad de documentos adjuntos;
- Producto certificado de Conformidad;
--Cantidad de embalaje;
--Fecha de envasado.
9.2.3 Embalaje logotipo
Debe haber un logotipo en la superficie externa de la caja de embalaje que no es fácil de borrar, y sus contenidos son:
--Nombre del fabricante de la;
--Nombre del producto y número de modelo;
Palabras o símbolos como "arriba" y "abajo";
--Y peso bruto dimensiones (longitud× ancho× altura).
9.3 Almacenamiento
El producto debe ser almacenado en una habitación ventilada, con una temperatura de -10℃~45℃ y una humedad relativa de no más de 85% o en un entorno de almacenamiento especificado por el fabricante. El aire a su alrededor no debe contener sustancias nocivas que deterioran el producto.
选购 DCL电动执行器

扭矩:20-600Nm
时间:4S~60S
角度:0~90° | 0~360°

Par de torsión: 20-2500Nm
Tiempo: 4S~75S
角度:0~90° | 0~360°
扭矩:12-1200Nm
时间:2S~12S
角度:0~90° | 0~360°












 Hubei Red Pública De Seguridad Nº 42018502006527
Hubei Red Pública De Seguridad Nº 42018502006527